Visual servo and multi-task control method for flying mechanical arm based on spherical model
A technology of visual servoing and control methods, which is applied in the field of drones and can solve problems such as limitations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
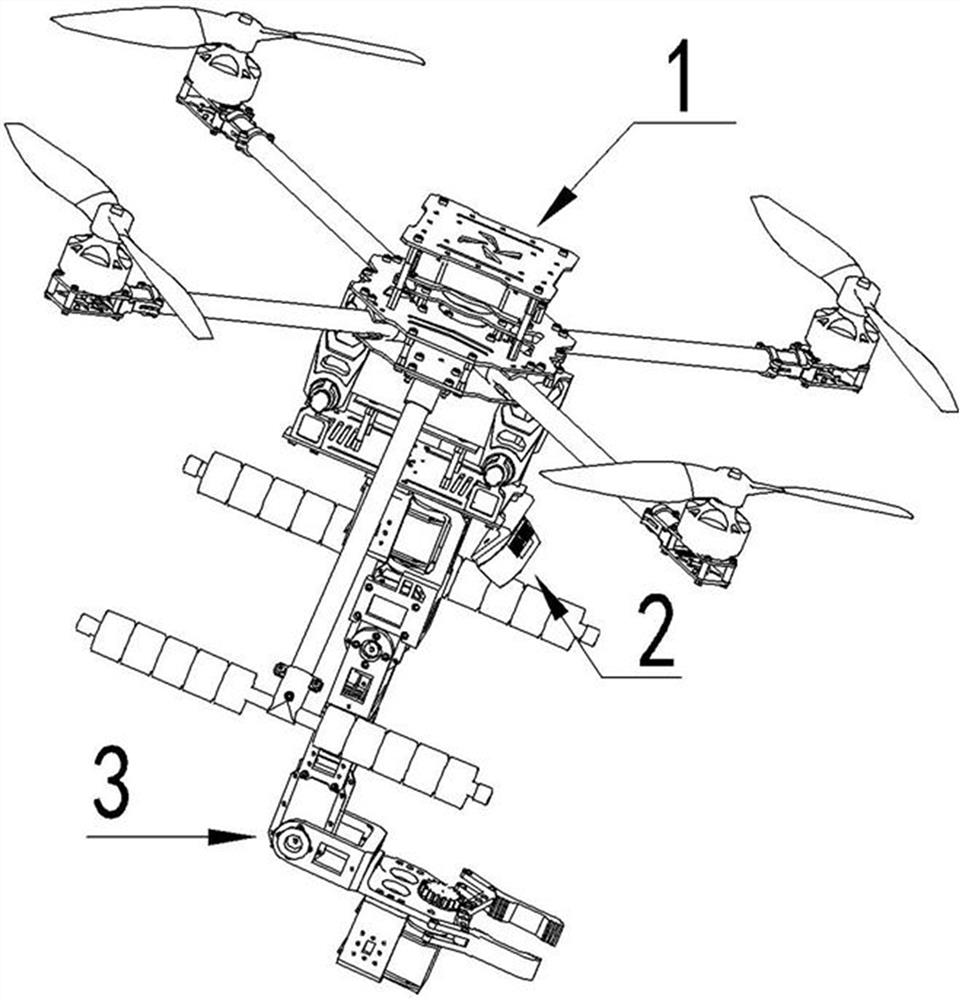
[0093] As shown in the figure, the visual servo structure of the flying manipulator based on the spherical model, the servo structure includes a UAV with six degrees of freedom, a manipulator with three degrees of freedom and a control module; the manipulator is installed on the base of the UAV The installation surface of the mechanical arm of the seat; the installation surface of the mechanical arm is also provided with a depth camera; the shooting angle of the depth camera is set at an angle to the installation surface of the mechanical arm, and the control module is connected with the depth camera and the mechanical arm, and Combine the depth camera and the robotic arm into a robotic hand-eye calibration system.
[0094] The mechanical arm includes three rotating joints; the installation surface of the mechanical arm is located directly under the platform of the base; the depth camera is an Intel RealSense camera.
[0095]The end of the mechanical arm is provided with an ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com