Workpiece three-dimensional point cloud registration method based on direction histogram signature features
A technology of direction histogram and three-dimensional point cloud, which is applied in image enhancement, image analysis, image data processing, etc., and can solve the problems of prone to deviation in positioning, sensitivity to lighting and object placement, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
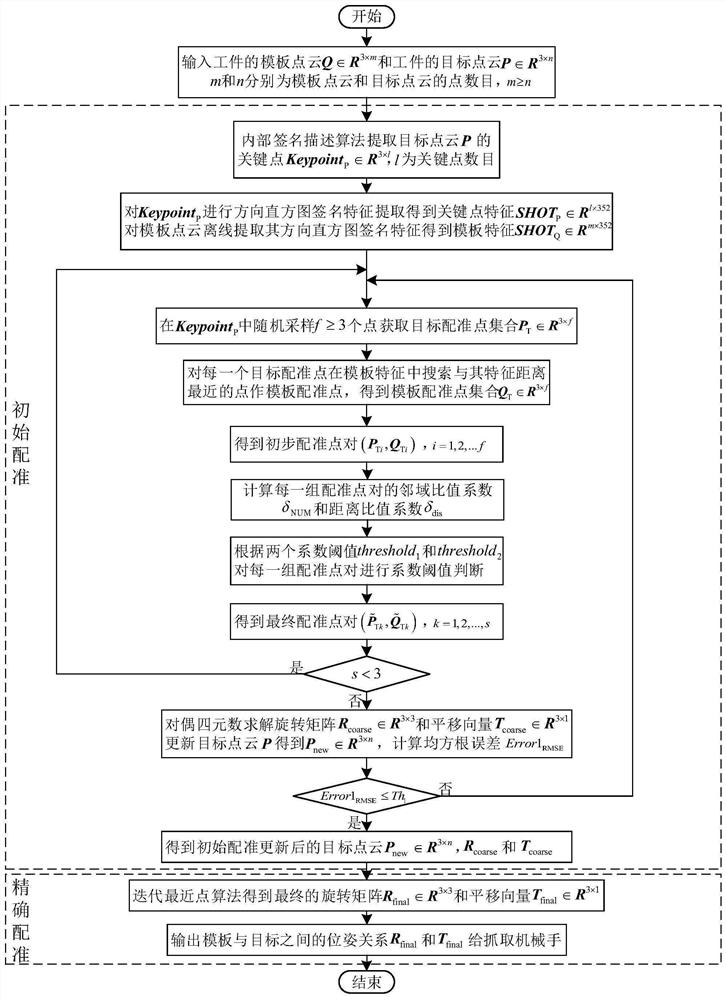
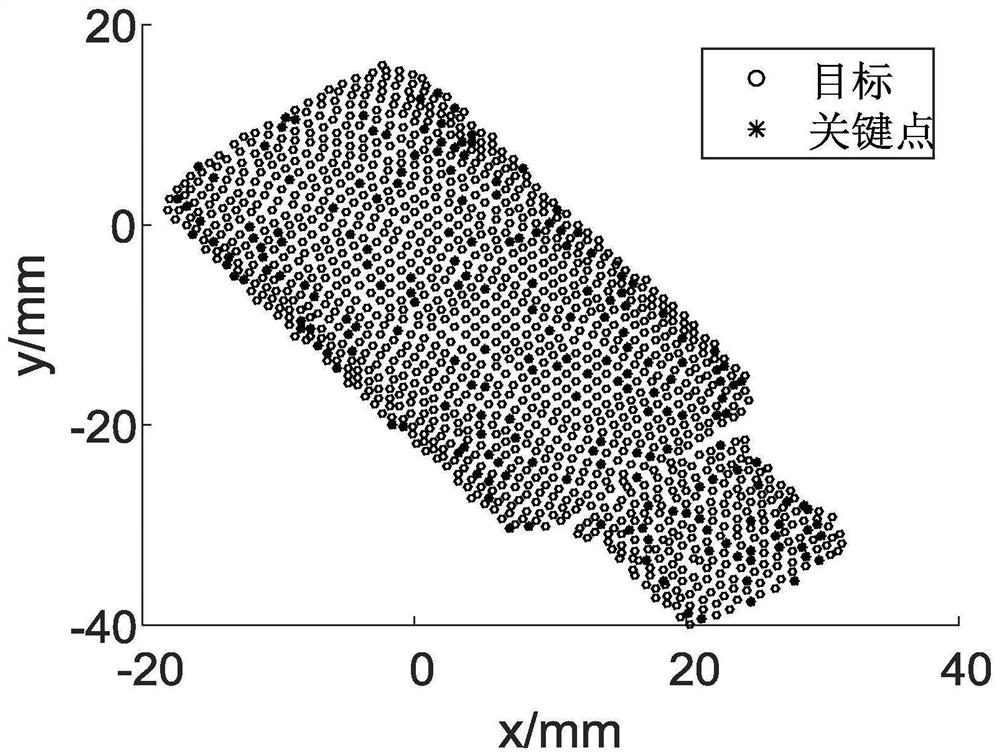
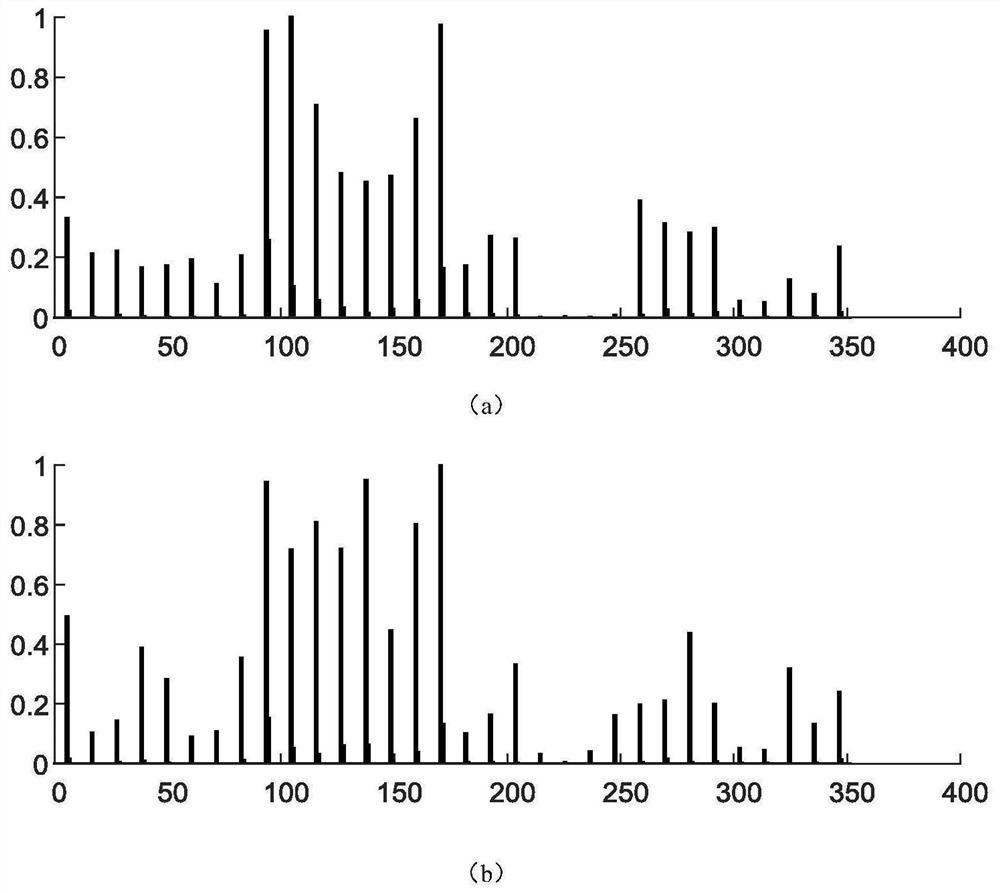
[0142] Using a 3D point cloud registration method based on the direction histogram signature feature proposed by the present invention,
[0143] The simulation platform uses Matlab R2014b, and the test data uses the 3D point cloud data of the workpiece scanned by the 3D structured light camera Sizector R of Shengxiang Technology Company. The invention can realize the solution of the transformation relationship of different positions between the template and the target, and here only the simulation results are given by taking the opposite position between the template and the target as an example. The length, width, and height of the workpiece are 6cm, 2.5cm, and 5cm, respectively, and the points of the template point cloud and the target point cloud are both 1500 points. The neighborhood radius of the target key point extraction is set to 1 mm, the upper limit of the key point threshold is generally between 0.6 and 1 and the lower limit is generally between 0.1 and 0.4, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com