Robust consensus method based on LPV multi-agent system
A multi-agent system and consensus technology, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as external interference of the system, achieve the effect of ensuring robust consensus and eliminating the dependence of algebraic connectivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
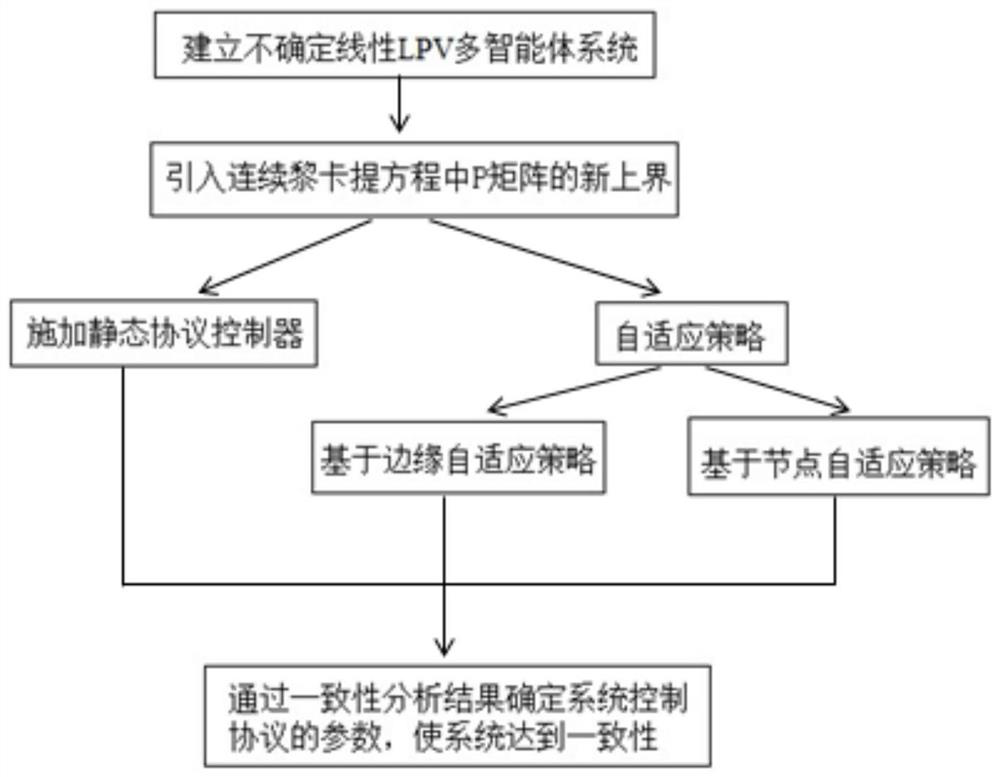
[0059] The robust consensus method based on the LPV multi-agent system of the present invention, the process is as follows figure 1 As shown, the steps are as follows:
[0060] Step (1) Establish an uncertain linear LPV multi-agent system composed of N vertices, the mathematical expression of the system is:
[0061]
[0062] where A and B are constant matrices, satisfying x i and u i are the state of node i and the state of control input u respectively, satisfying ΔA is a real matrix function, satisfying: ‖ΔA‖≤d, d is a constant greater than 0; the system expression (1) satisfies (A, B) is stable.
[0063] Step (2) introduces a new upper bound of the P matrix in the continuous Riccati equation in the LPV multi-agent system;
[0064] Assuming that the constant β>0 satisfies A+A T T , when (A,B) is stable, any constant ε>0 satisfies the following continuous algebraic Riccati differential equation
[0065] A T P+PA-PBB T P=-εI N (2)
[0066] There is a unique posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com