Library management robot and control method thereof
A control method and robot technology, applied in the direction of program control of manipulators, instruments, manipulators, etc., can solve problems such as time-consuming and energy-consuming classification, sorting, heavy tasks, and high labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0053] This embodiment provides a library management robot, including a navigation module, a walking module, an identification module, a book fetching module, and a main control module; the navigation module, walking module, identification module, and book fetching module are all connected to the main control module;
[0054] The navigation module realizes point-to-point optimal path planning and navigation according to the position information of the bookshelf where the target book is located and its own position; the main control module controls the walking module to move between the bookshelves according to the navigation of the navigation module, so that the robot Move to the vicinity of the bookshelf where the target book is located;
[0055] The identification module is used to identify the target book near the position of the bookshelf where the target book is located; the main control module controls the book fetching module to grab the target book according to the iden...
Embodiment 2
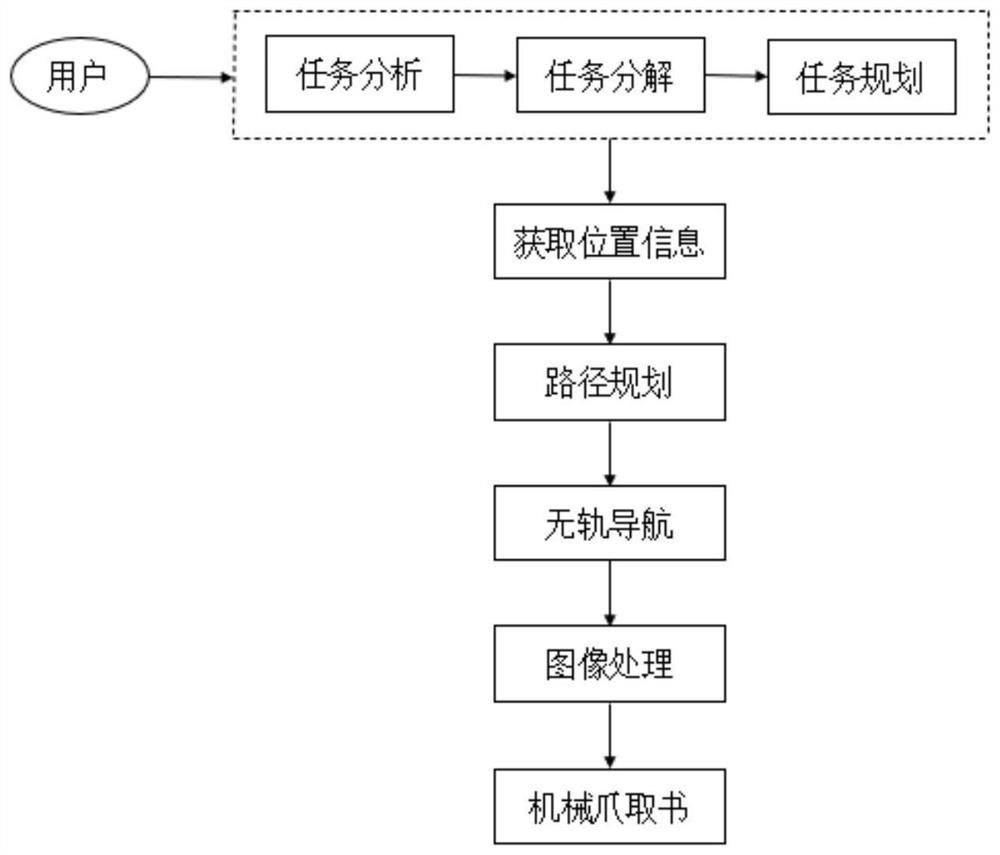
[0065] This embodiment provides a control method for a library management robot, comprising the following steps:
[0066] Step 1, the navigation module realizes point-to-point optimal
[0067] Path planning and navigation;
[0068] Step 2, the main control module controls the walking module to move between the bookshelves according to the navigation of the navigation module, so that the robot moves to the vicinity of the bookshelf where the target book is located;
[0069] Step 3, the identification module identifies the target book near the position of the bookshelf where the target book is located, and locates the position of the target book;
[0070] Step 4. According to the recognition result of the recognition module, the main control module controls the book fetching module to grab the target book, and place the target book correctly and safely on the book support board (which can be arranged under the mechanical rod).
[0071] Further, in the step 3, the RFID electron...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com