Unmanned vehicle reinforcement learning training environment construction method and training system thereof
A technology of reinforcement learning and construction methods, applied in neural learning methods, neural architectures, biological neural network models, etc., can solve the problem that reinforcement learning strategies are difficult to transfer directly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention. The technical features of the various implementations in the present invention can be combined accordingly on the premise that there is no conflict with each other.
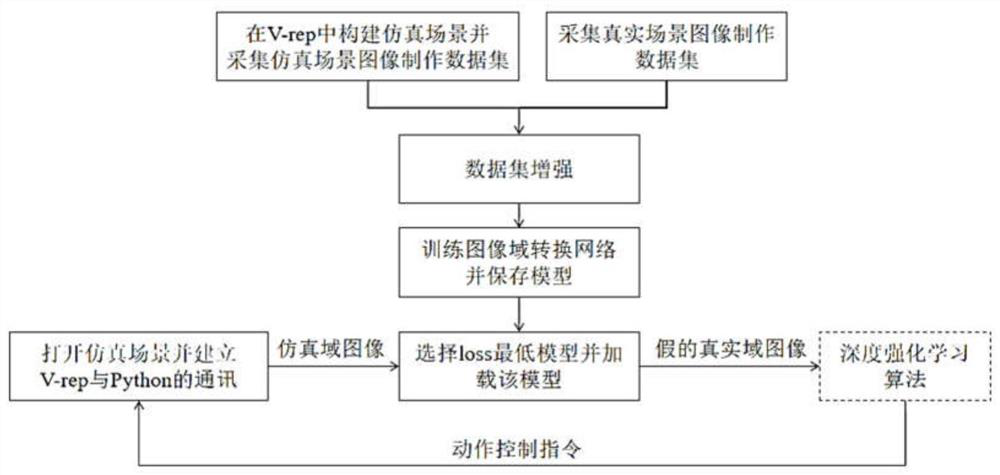
[0020] Below in conjunction with accompanying drawing, the present invention is further described, as figure 1 As shown, a method for constructing an unmanned vehicle reinforcement learning training environment includes the following steps:
[0021] Step 1: In the real unmanned vehicle application scenario, use the real vehicle camera to collect pictures as the real domain data set. The real domain data set should be taken from the first-person perspective of the unmanned vehicle, take 1000 images, and collect each A picture is compressed into a size of 256pixel×256pixel×3channels.
[0022] Step ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com