Cantilever grabbing mechanical arm of railway cantilever mounting robot
A technology of robot and mechanical arm, applied in the field of wrist arm installation, which can solve the problems of no mechanical arm and grasping mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
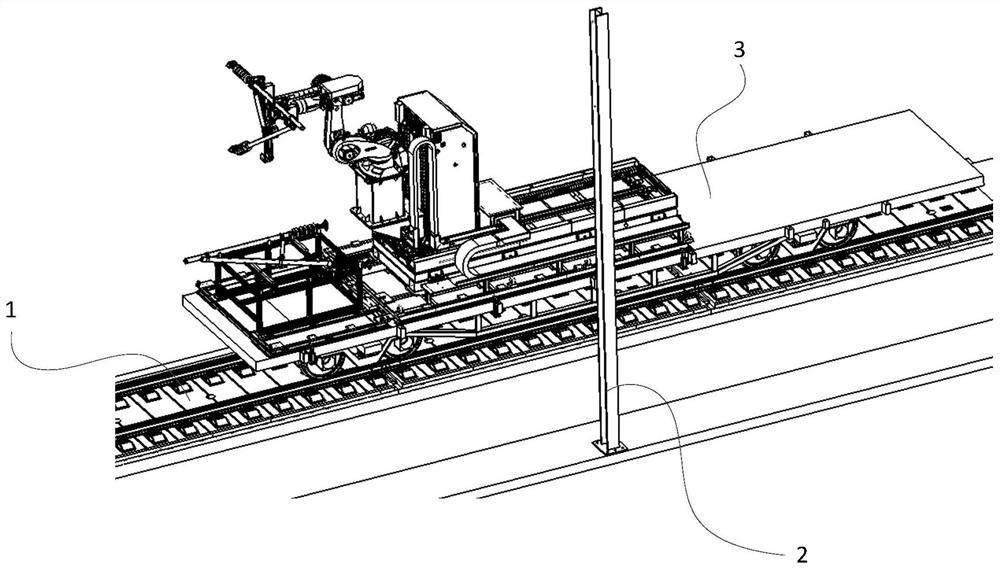
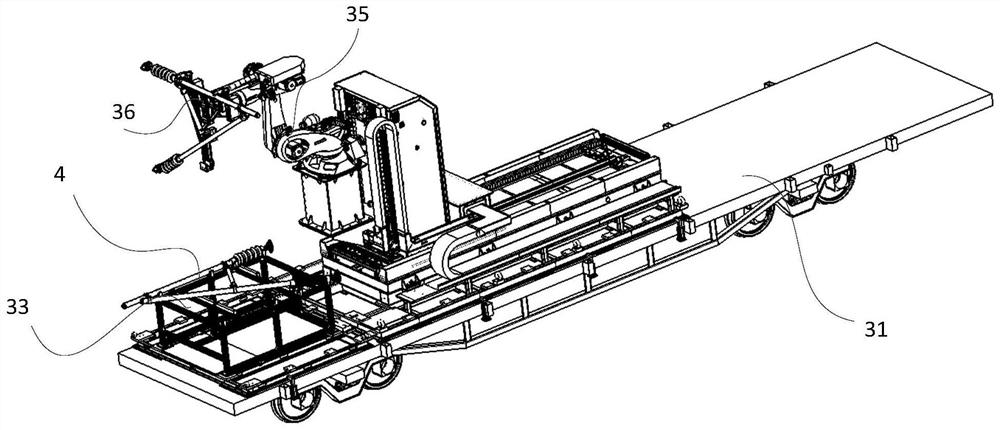
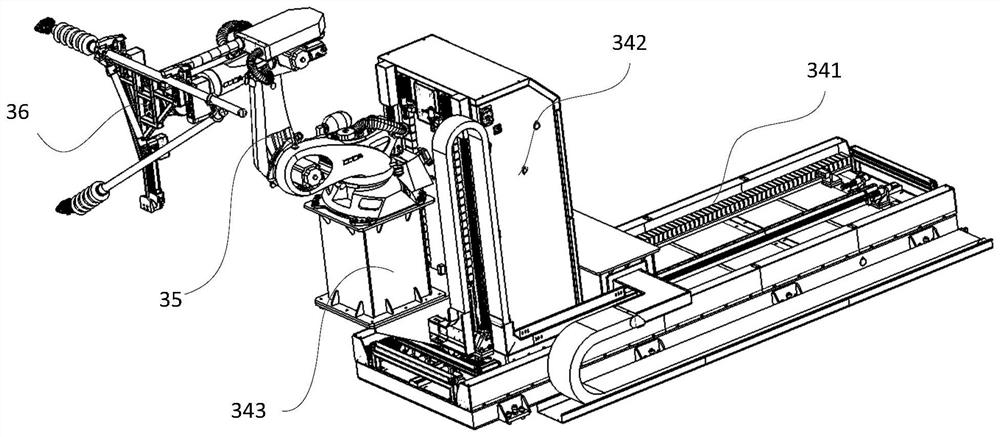
[0036] Such as Figure 1 to Figure 15 As shown, this embodiment provides a railway arm arm installation robot, which travels along the direction of the track 1 and lifts the arm arm 4 to the installation position of the catenary pillar 2 . First of all, it should be noted that the serial numbers such as "first" and "second" in this embodiment are only used to distinguish similar components, and should not be understood as specific limitations on the scope of protection. In addition, directional terms such as "bottom", "top", "surrounding edge", and "center" in this embodiment are described based on the drawings. Not only that, this embodiment is based on the improvement of the structure, and does not improve the software program, which is a combination of conventional program segments, which will not be described in detail here. The mechanical arm of this embodiment is purchased, and its internal structure will not be described here. In this embodiment, a controller and a po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com