A Multi-target Tracking Evaluation Method Based on Fourier Transform Considering Shape Differences
A multi-target tracking and Fourier transform technology, applied in the field of multi-target tracking, can solve the problems of poor distinguishability, unfavorable comparison results, and inability to evaluate the estimation performance of tracking algorithms, etc., to achieve good distinguishability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below with reference to the accompanying drawings.
[0043] For the convenience of understanding, the FOSPA distance is explained below. The FOSPA distance refers to an improved OSPA distance based on the Fourier operator.
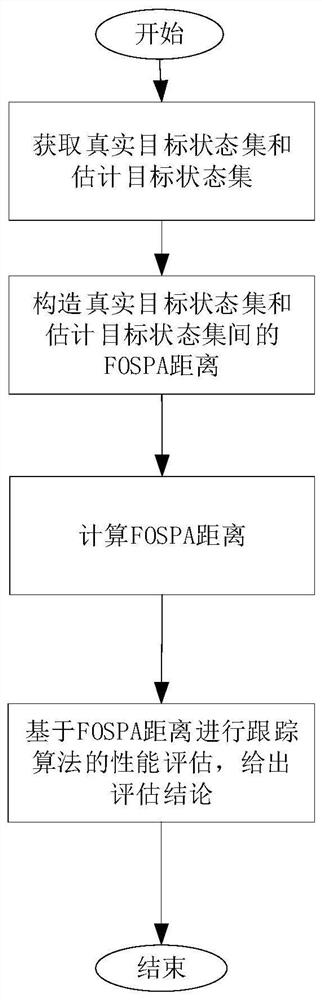
[0044] like figure 1 As shown, the present embodiment provides a multi-target tracking evaluation method considering shape difference based on Fourier transform, and the steps are as follows:
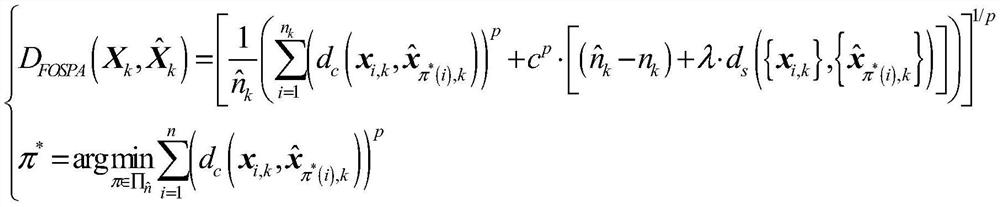
[0045] Step 1. Assume that the real state set of the target at time k in the multi-target tracking process is The target state estimation set obtained by peak extraction in the random finite set multi-target tracking algorithm is: where n k and are the known real target number and the estimated target number extracted from the tracker, respectively, in the tracking model and Usually contains a position component and a velocity component, such as is to include the position component p x,k and p y,k ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com