Underwater robot motion path tracking method based on sliding mode robust control
An underwater robot, a technology of robot movement, applied in the field of robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
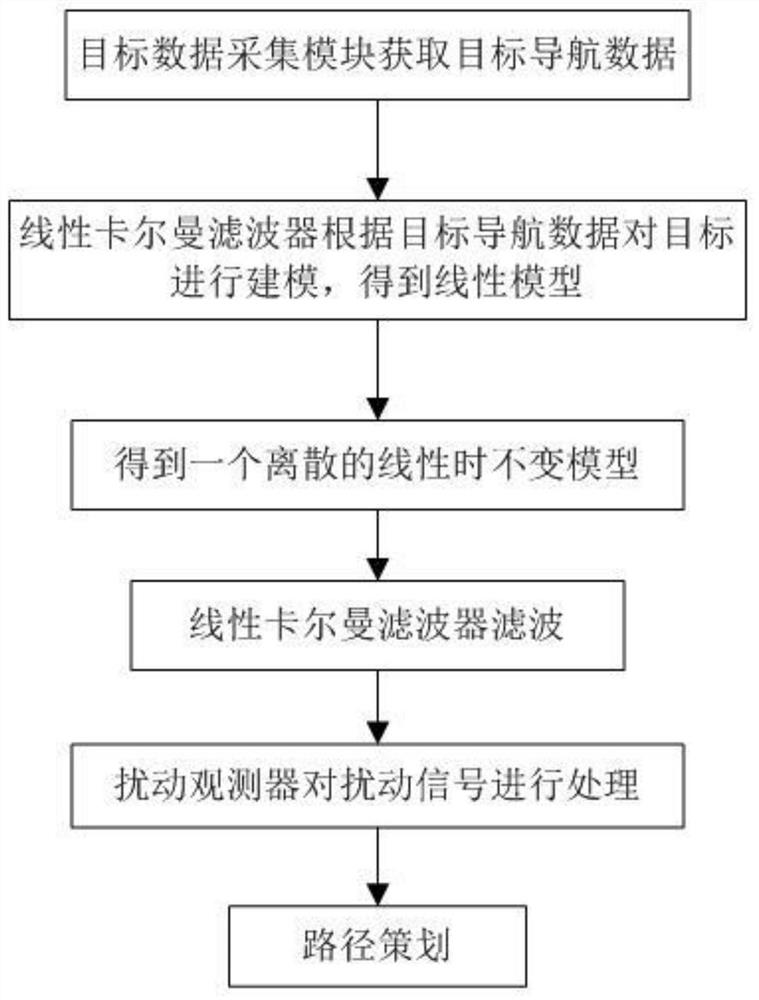
[0056] Such as Figure 1-Figure 5 A motion path tracking method for an underwater robot based on sliding mode robust control is shown, including the following steps:
[0057] Step 1: Establish the autonomous underwater robot navigation system, underwater robot control system and central server cluster, and the central server cluster communicates with the autonomous underwater robot navigation system through Wi-Fi;
[0058] The autonomous underwater robot navigation system is used to collect underwater information, robot attitude information and inertial navigation information;
[0059] The underwater robot control system is used for attitude adjustment, center of gravity adjustment and motion control of the underwater robot;
[0060] Establish target data acquisition module, linear Kalman filter, sliding mode robust control module, disturbance observer and path control module in the central server cluster;
[0061]The target data collection module is used to regularly collec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com