Colonoscope conveying device with force sensing function based on UR mechanical arm
A conveying device and robotic arm technology, applied in the field of endoscopic surgical medical robots, can solve problems such as difficult operation, high risk, and complicated bending, and achieve the effects of liberating labor intensity, ensuring conveying accuracy, and preventing slippage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
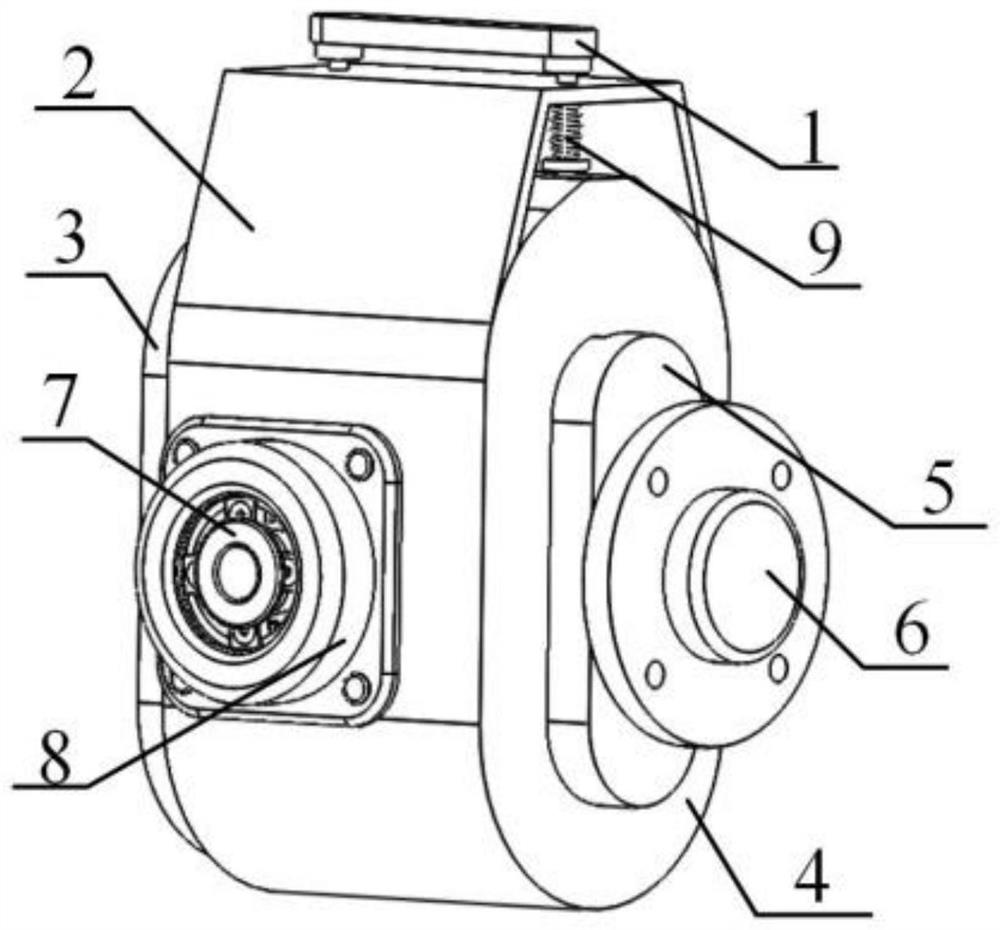
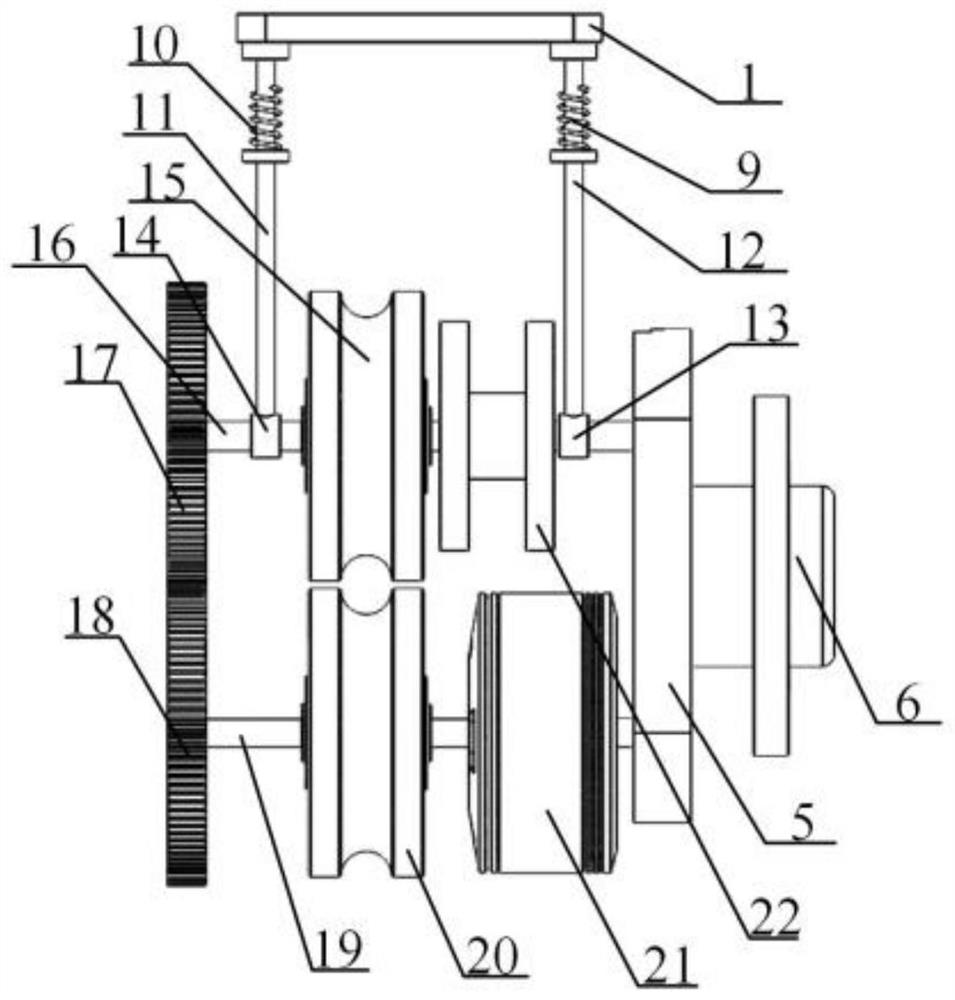
[0022] Combine below figure 1 , 2 , 3, 4, and 5 illustrate this embodiment. The present invention relates to the field of endoscopic surgery medical robots, and in particular to the operation method for doctors to perform colon examinations, including 1. Hand lever, 2. Fixed plate, 3. Gear protection frame, 4. Shell, 5. Slide rail frame, 6. Transfer plate, 7. Three-dimensional force sensor, 8. Sensor fixing frame, 9. Spring I, 10. Spring II, 11. Suspender II, 12. Suspender I, 13. Ring I, 14. Ring II, 15. Roller I, 16. Sliding shaft, 17. Gear I, 18. Gear II, 19. Fixed shaft, 20. Roller II, 21. Motor, 22. Torque sensor, 23UR mechanical arm , the structure of the device is simple, and the device can help the doctor to complete the positioning of the colonoscope and the delivery of the colonoscope body to the intestinal tract of the patient. For preparation, fix the adapter plate 6 on the end of the UR mechanical arm 23, drive the UR mechanical arm 23 to make the device at a sui...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com