


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Control device of split type minimally invasive surgery robot
A minimally invasive surgery and control device technology, applied in the direction of surgical robots, surgical manipulators, etc., can solve the problems of replacement, inconvenient control operation, and inconvenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
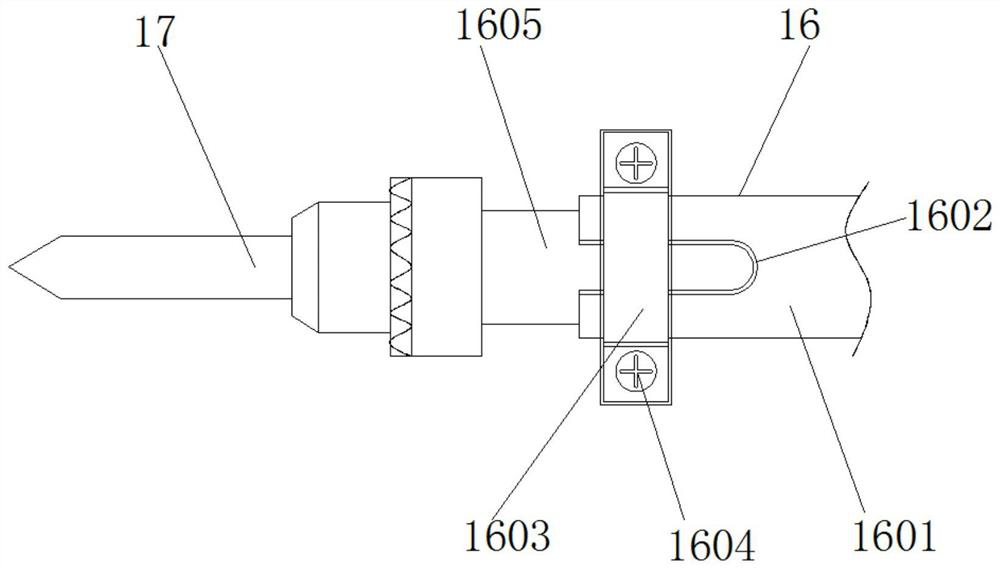
[0030]In order to adjust the overall height of the device through the hydraulic rod, the lateral position of the tool can be adjusted through the threaded rod, and different tools can be adjusted and replaced through the adjustment mechanism, which brings convenience to the staff. The function is convenient to drive the threaded rod to rotate, so that it is convenient to drive the slider to slide in the beam, so as to bring convenience to the adjustment of the lower surgical knife, and it is convenient to disassemble and replace the minimally invasive surgical knife through the ring fixing part and the fixing screw, making the device Any minimally invasive surgical tool can be installed and fixed, which greatly enhances the practicability of the device, and the length of the adjustment rod can also be adjusted to bring convenience to the use of medical staff. The first hydraulic cylinder drives the connection plate to lift Then the connecting plate drives the sliding cylinder t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com