Meal delivery robot
A food delivery robot and rack technology, applied in the field of robots, can solve the problems of limited movement trajectory, difficult to change the customized trajectory, and can only walk on the established magnetic strip line, etc., to achieve the effect of reducing the previous work.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
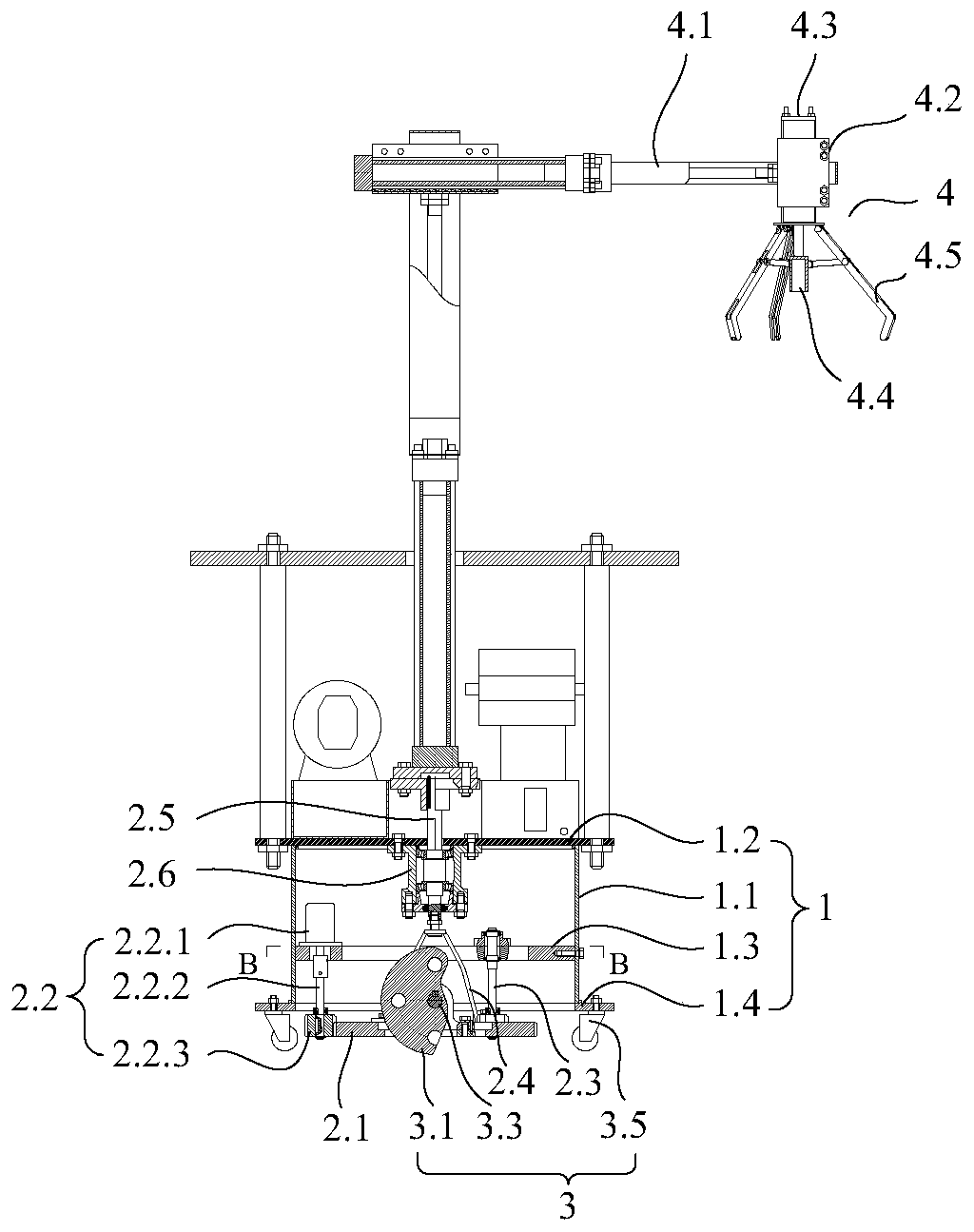
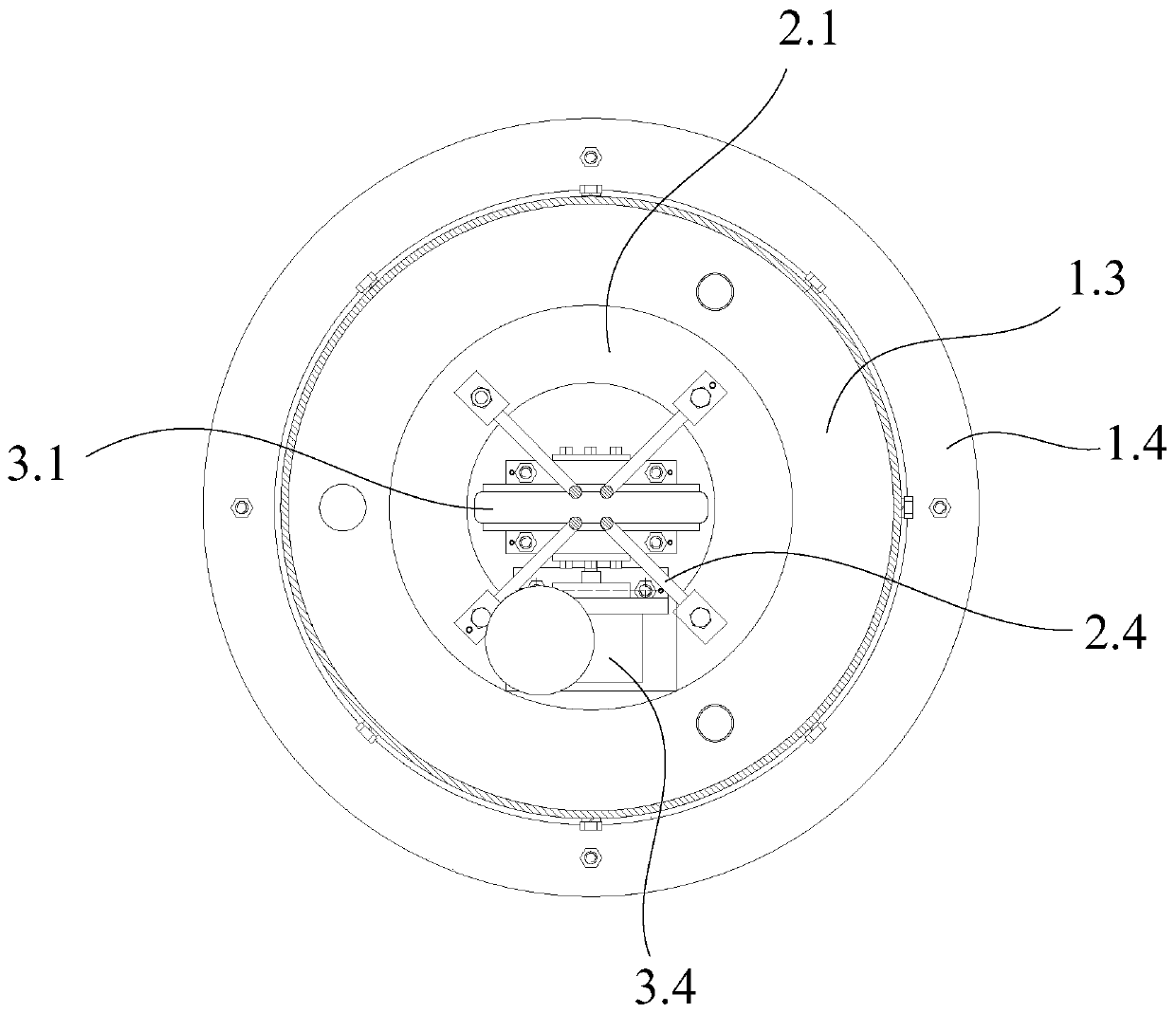
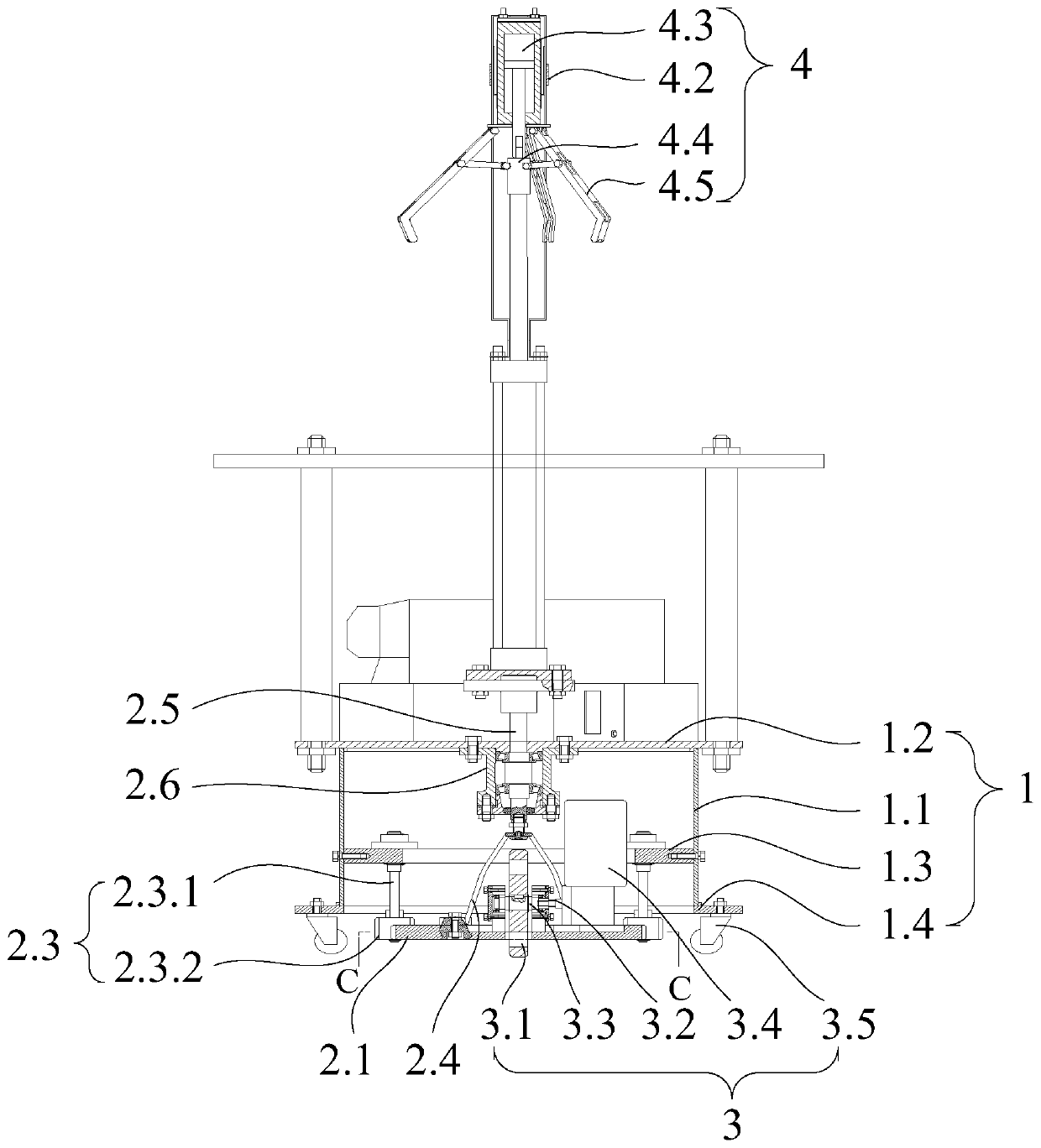
[0073] Such as Figure 1 to Figure 5 As shown, a meal delivery robot includes:
[0074] Rack 1;
[0075] A steering mechanism 2, the steering mechanism 2 is placed in the frame 1, and is fixedly connected with the frame 1; the upper end of the steering mechanism 2 protrudes upward from the frame 1;
[0076] Traveling mechanism 3, described traveling mechanism 3 is placed on described steering mechanism 2, and is fixedly connected with described frame 1, and described traveling mechanism 3 drives described frame 1 to move;
[0077] A pick-and-place mechanism 4, the pick-and-place mechanism 4 is placed above the frame 1, and is connected with the upper end of the steering mechanism 2, and the steering mechanism 2 dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com