Mobile robot map construction method
A mobile robot and map technology, applied in the direction of instruments, 3D modeling, image analysis, etc., can solve the problems of low precision, susceptibility to interference, insufficient reliability, etc., to ensure integrity, improve accuracy, improve obstacle avoidance and navigation Accurate and real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
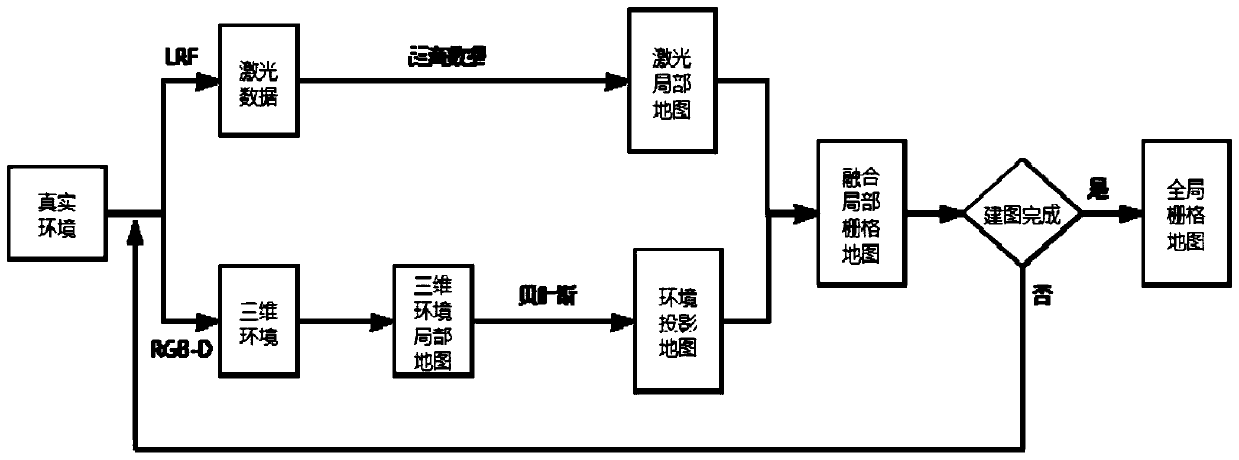
[0018] combine figure 1 , a method for constructing a map by a mobile robot of the present invention, comprising:
[0019] Step 1: When the robot uses Kinect and LiDAR to collect data, it selects feature points through image features to determine the data information needed to build a map. During the scanning process, it compares the matching degree of feature points between the current frame and the previous frame to further select Information more suitable for building maps. Then map the detected obstacle image coordinates to the actual working environment coordinates. According to the location information of the detected obstacles in the actual environment, it is determined that they belong to the discretized grid, and a local grid map is established.
[0020] Step 2: Bayesian inference is a statistical data fusion algorithm based on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com