A navigation positioning and task planning method for archival robots
A task planning, navigation and positioning technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to guarantee the same width of the work area, difficulty in robot target recognition, and difficulty in human-computer interaction on the client side. Wide applicability and efficient human-computer interaction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
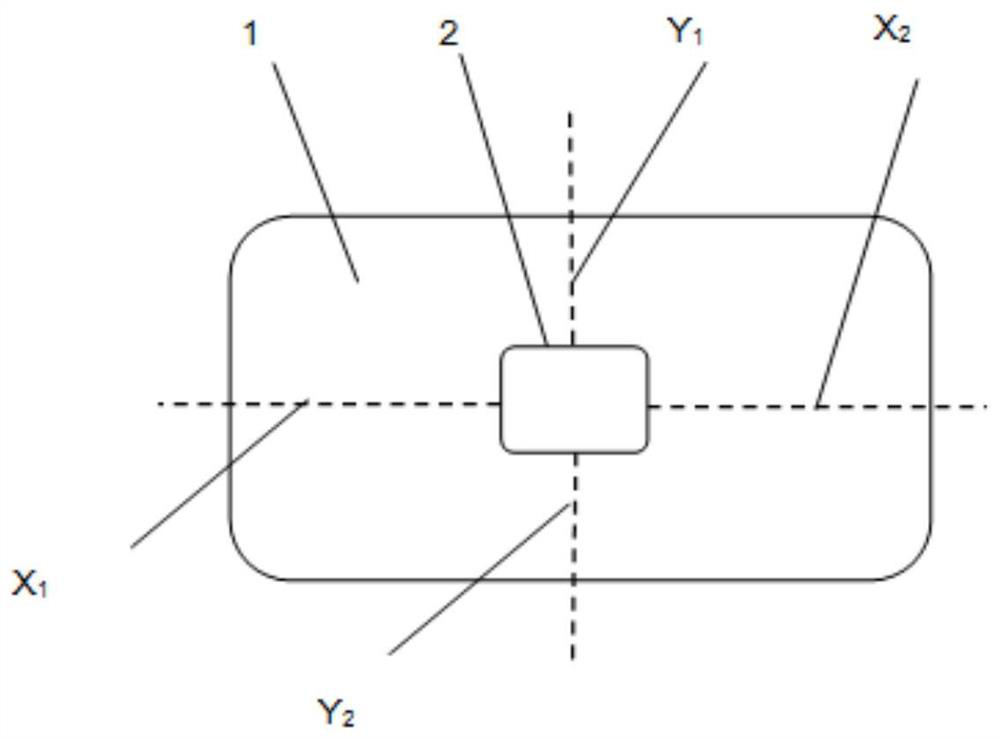
[0038] The invention is carried out using the following devices, robotic devices such as figure 1 shown.
[0039] The rangefinder group 2 is installed on the robot 1. The rangefinder includes four laser rangefinders, X1, X2, Y1, and Y2. Their range is 0-50m, the measurement accuracy is 1mm, and the response frequency is up to 10Hz. At the same time, X1, X2, Y1, and Y2 also represent the reading values of the four sensors.
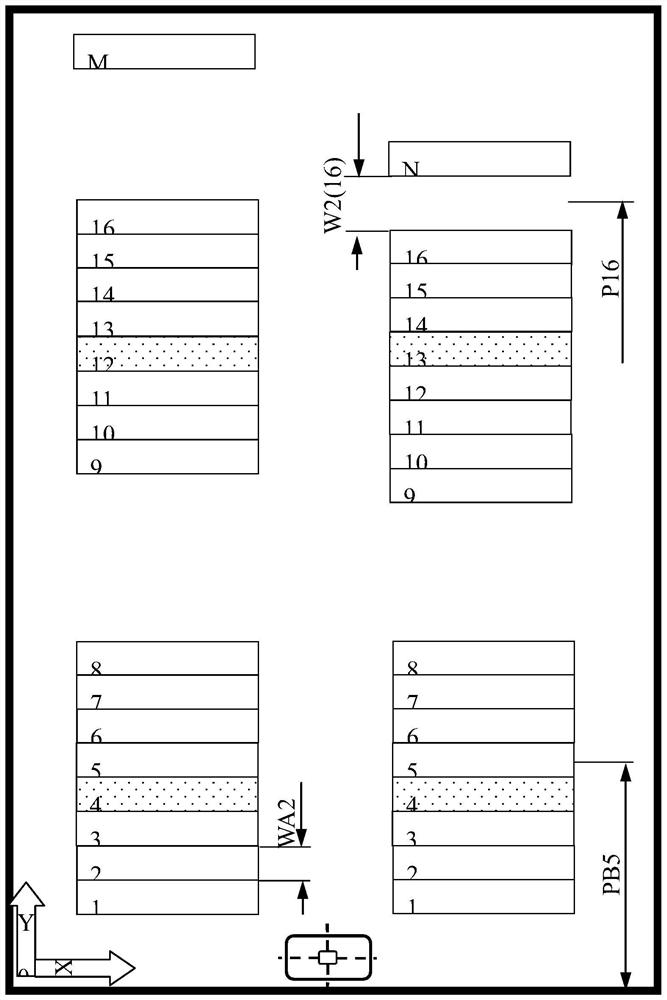
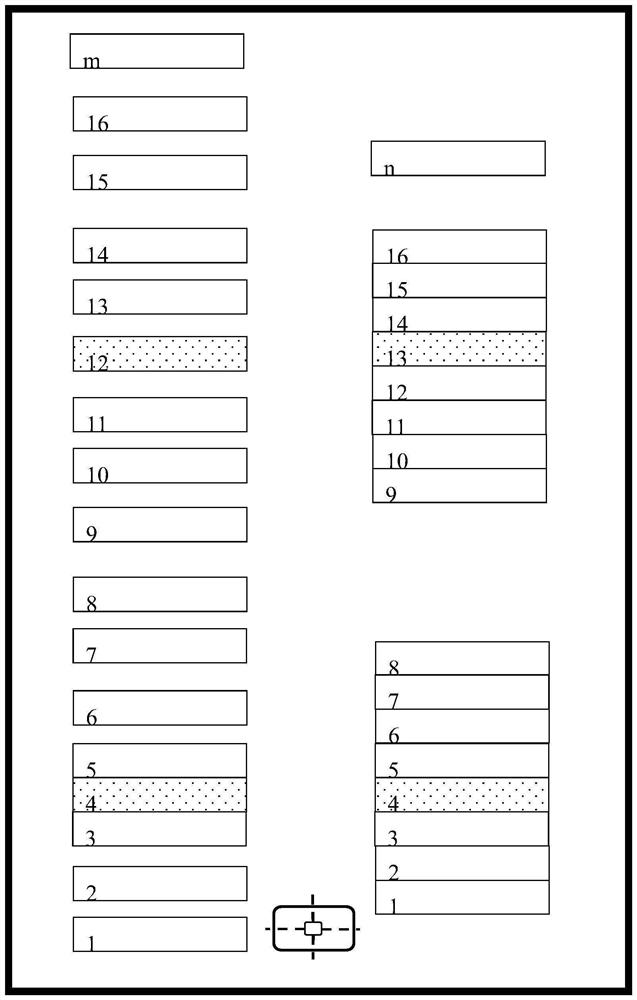
[0040] figure 2 It is a schematic diagram of the layout of a large archive. The outermost black box is the wall of the warehouse, and the bottom of the picture is the robot parking area. There are four file racks in the library. When the files are stored, the file racks are grouped together and opened only when access is required. Such as figure 1 There are a total of N file racks on the right side of the center, No...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com