Laser SLAM adaptive resolution raster map construction method
A construction method and grid map technology, which can be used in the re-radiation of electromagnetic waves, the use of re-radiation, measurement devices, etc., and can solve problems such as the same resolution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Embodiment of the present invention is described in detail below in conjunction with accompanying drawing and embodiment, but the present invention is not limited to following embodiment, any researcher who is familiar with this technical field is within the disclosed scope of patent of the present invention, without departing from this invention Various changes made under the premise of the purpose of the invention all belong to the protection scope of the patent of the invention.
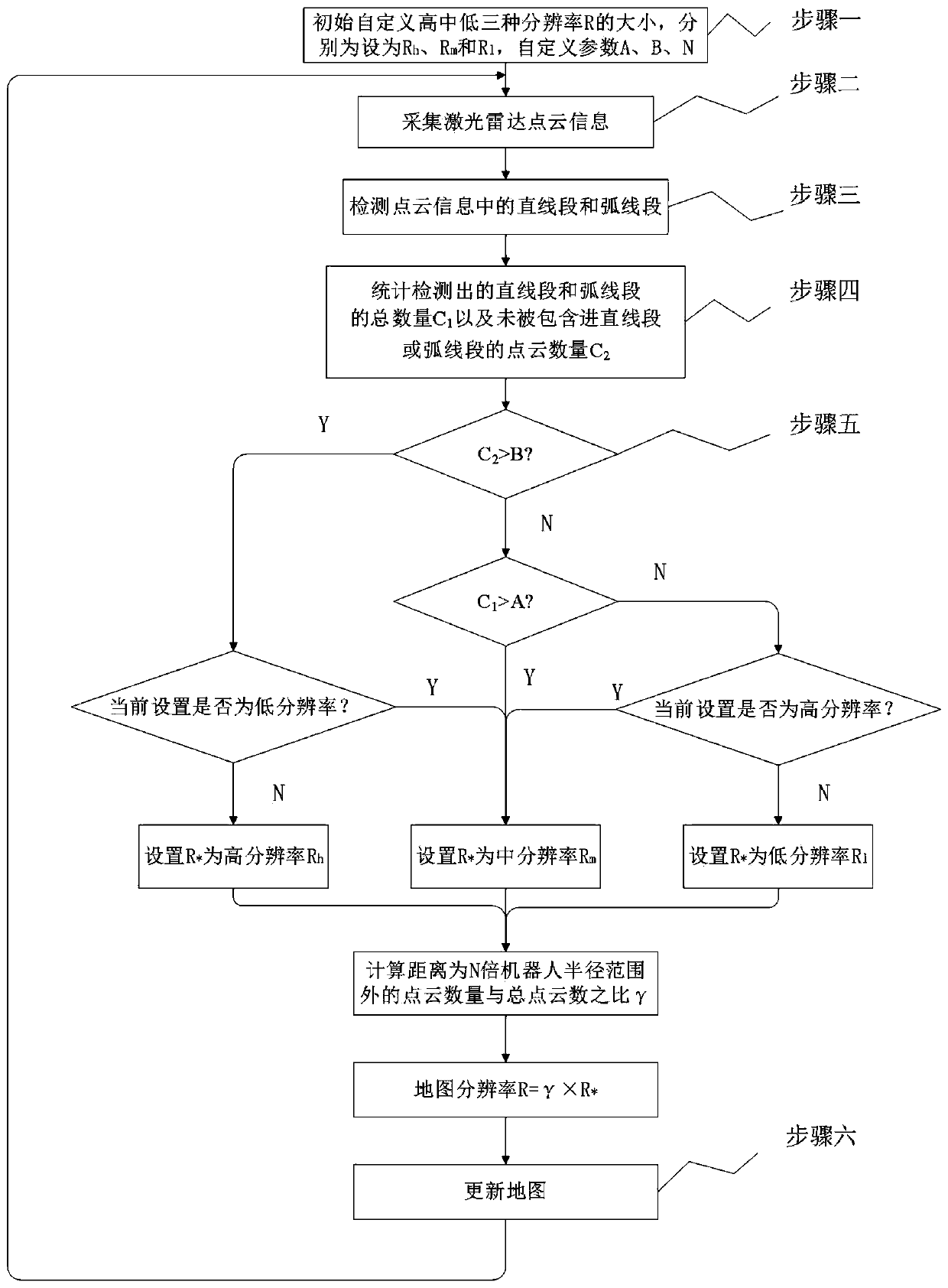
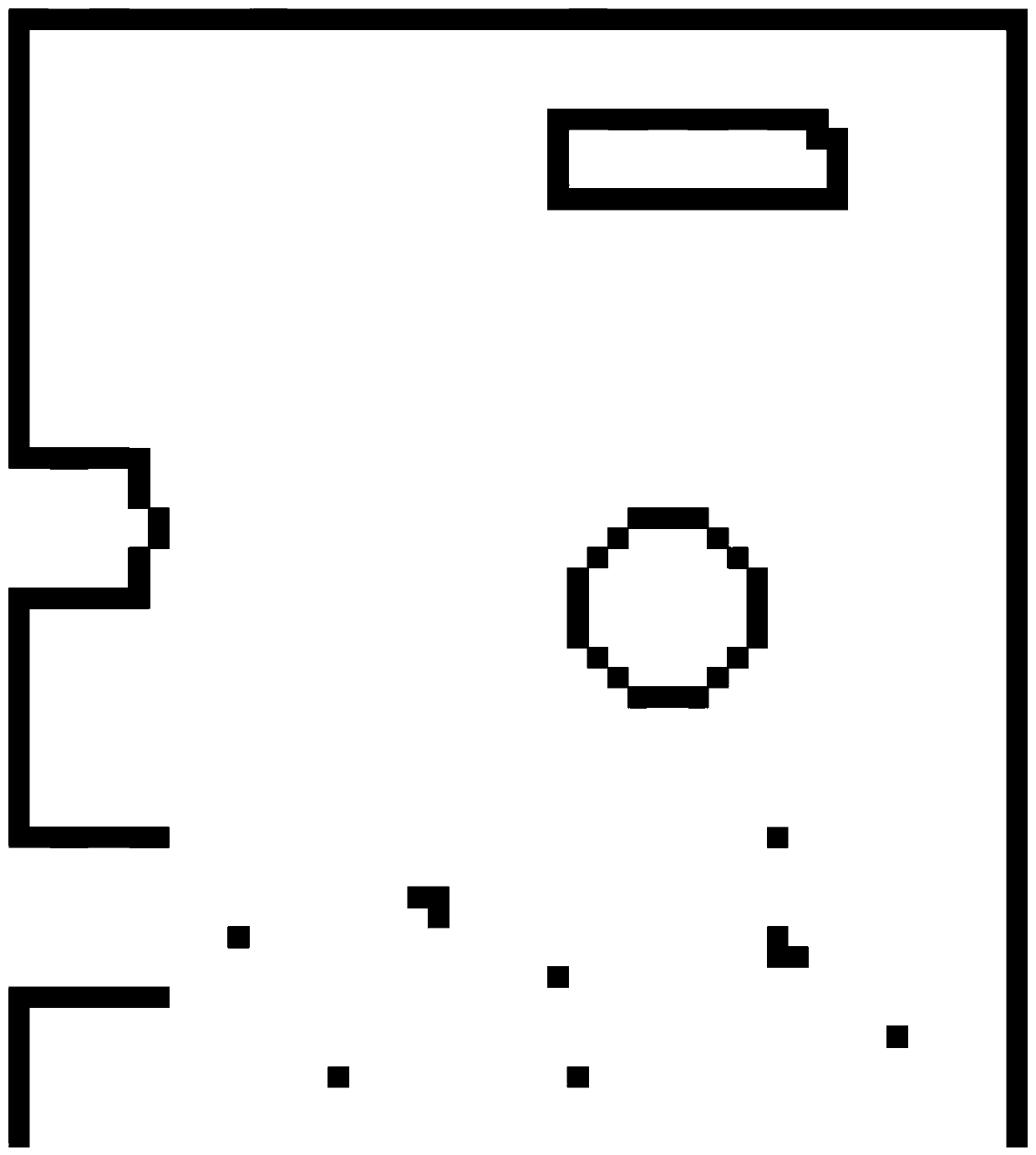
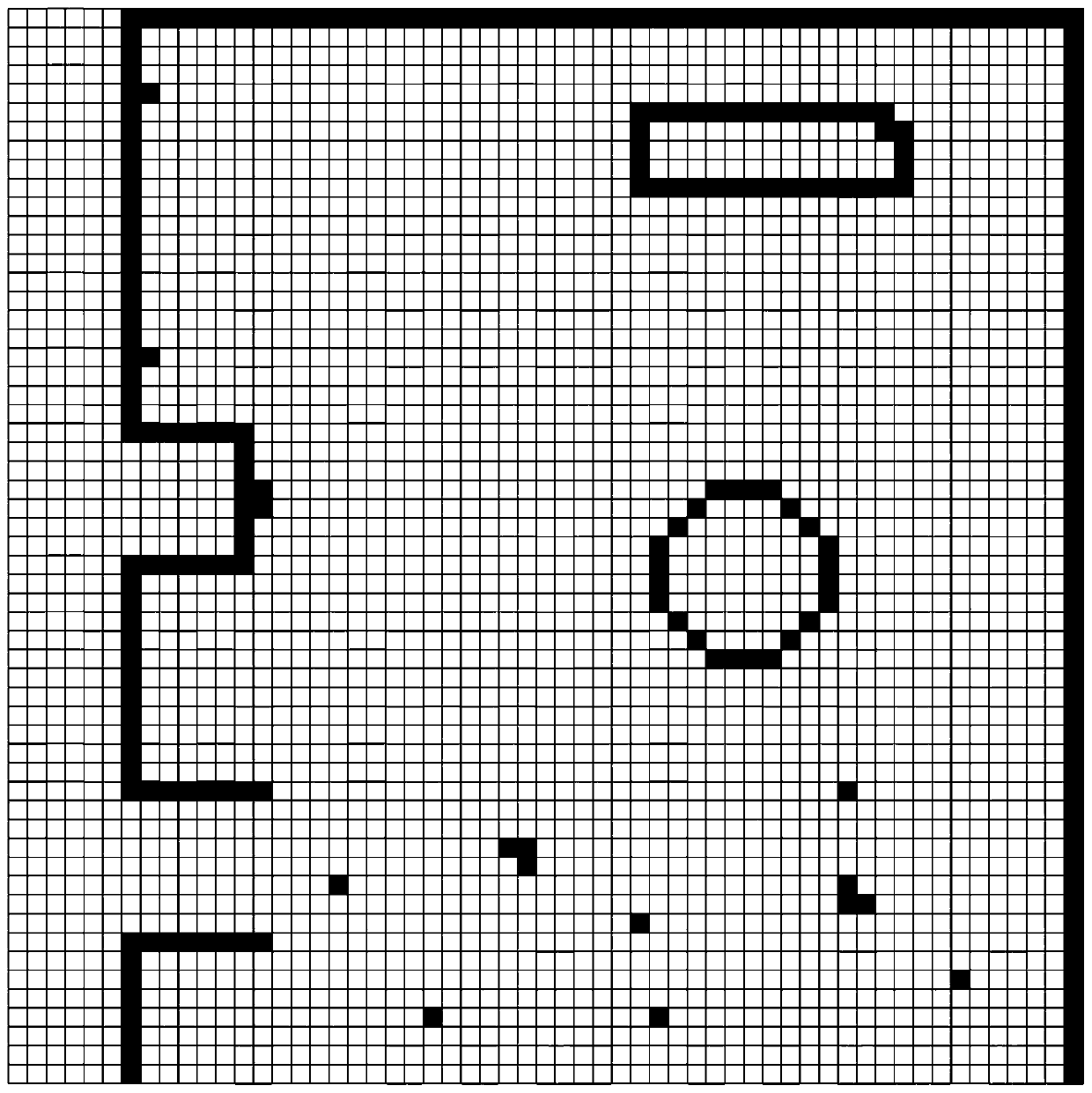
[0035] To create a map in a large-scale environment, the map of most scenes does not need a high resolution, otherwise it will waste storage space and computing resources. To construct a map in a scene with many obstacles (such as tables and chairs in the office), you need Higher resolution, otherwise some smaller objects will be missed. The present invention proposes a solution to the above problems, and constructs a grid map whose resolution is determined by the distribution of objects in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com