Quad-rotor guaranteed performance quantitative control method considering airborne resource limitation
A control method and resource-limited technology, applied in the field of quadrotor automatic control, which can solve problems such as complex unknown interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with specific examples.
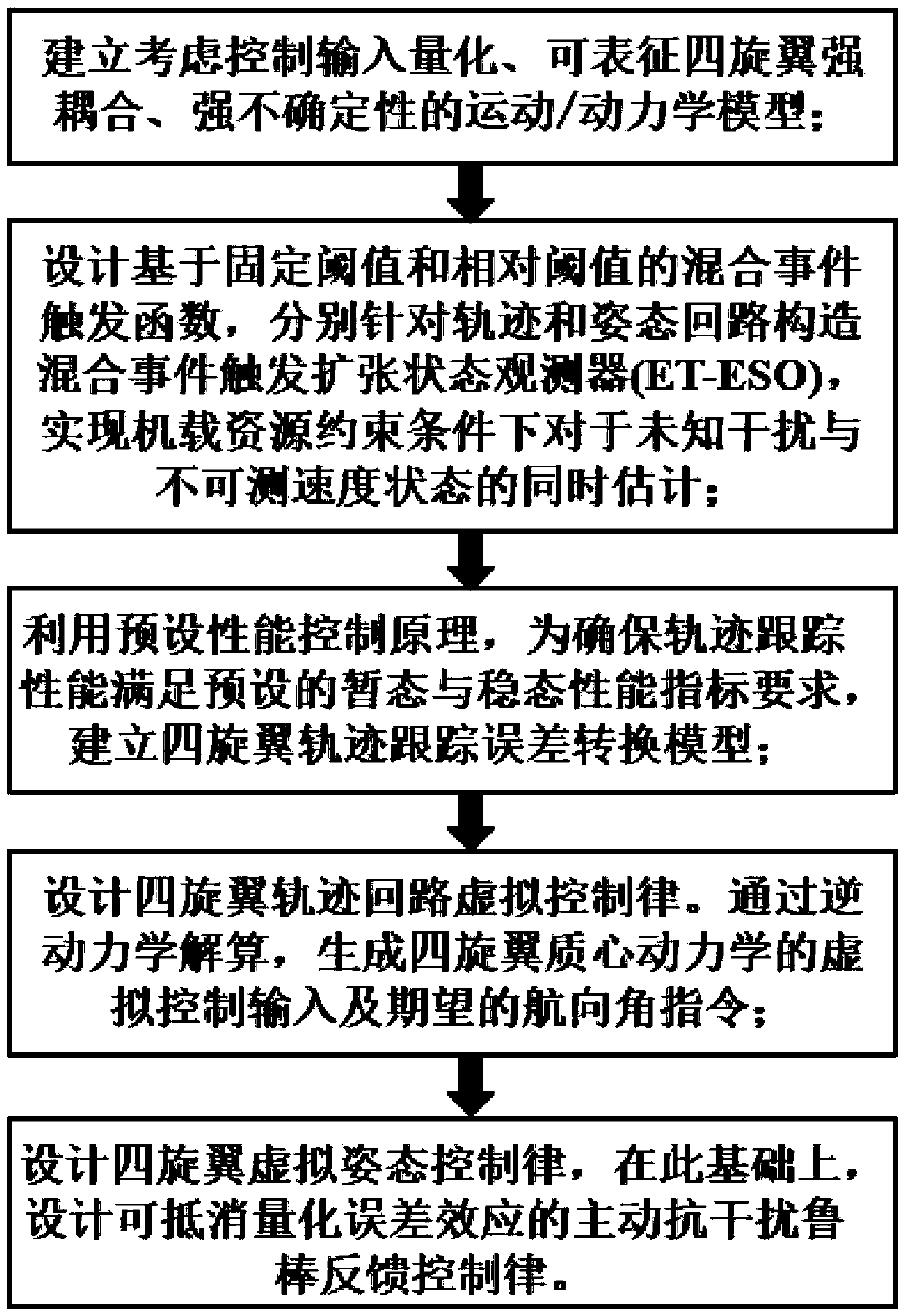
[0051] A quadrotor energy-guaranteed quantitative control method considering the limitation of airborne resources, comprising the following steps:
[0052] (1) Establish a motion / dynamics model that considers the control input quantification and can characterize the quadrotor strong coupling and strong uncertainty:
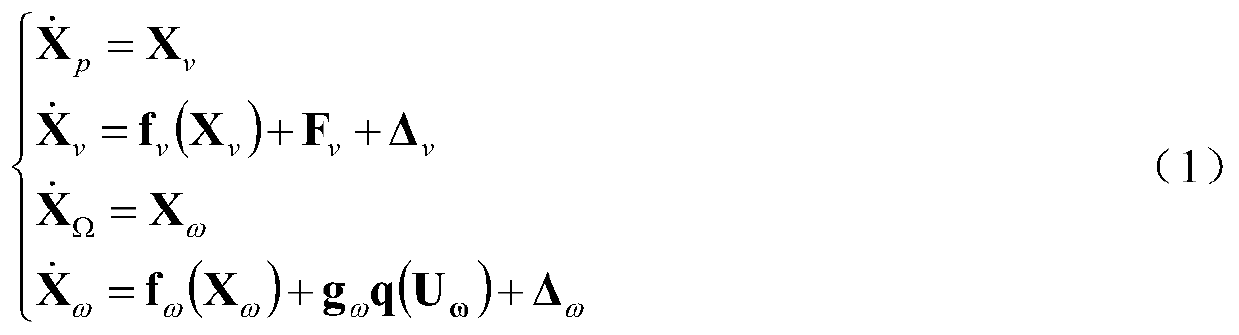
[0053] First, the quadrotor motion / dynamic model considering the quantization of the input control torque is established as follows:
[0054]
[0055] Among them, X p =[X p,1 ,X p,2 ,X p,3 ] T and x v =[X v,1 ,X v,2 ,X v,3 ] T Indicates the position and velocity vector of the quadrotor in the inertial coordinate system; X Ω =[X Ω,1 ,X Ω,2 ,X Ω,3 ] T and x ω =[X ω,1 ,X ω,2 ,X ω,3 ] T Indicates the rotation angle and angular velocity vector in the body coordinate system; and represent the smooth nonlinear function terms of the velocity and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com