Cleaning robots and their cleaning modes
A cleaning robot, cleaning mode technology, applied in the direction of cleaning machinery, cleaning equipment, machine parts, etc., can solve the problems of limited cleaning effect, incomplete cleaning and uncleanness, etc., to achieve the effect of improving cleanliness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
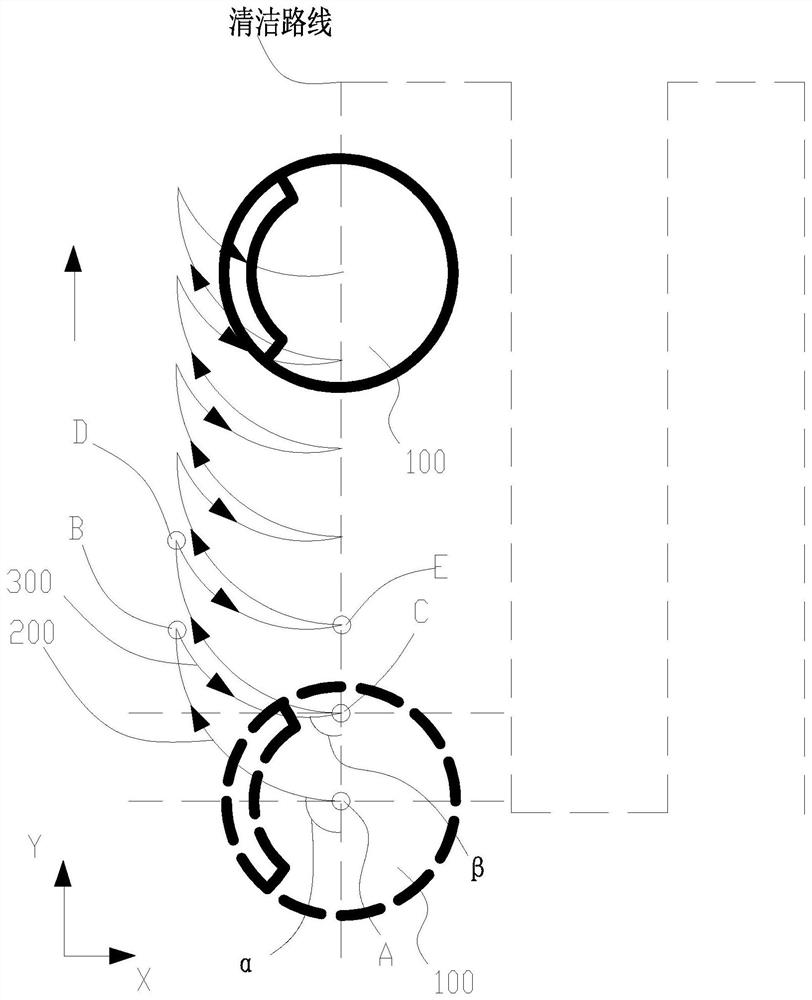
[0045] see Figure 1 to Figure 7 , the embodiment of the present application provides a cleaning mode, and the cleaning mode is applied to the cleaning robot 100 . It can be understood that the cleaning robot 100 may be any one of a sweeping robot, a floor mopping robot, a window cleaning robot, or a vacuuming robot, which is not limited herein. The cleaning robot 100 is configured to move by itself in the area to be cleaned. For example, the cleaning robot 100 establishes an environmental map through sensors, generates a cleaning route according to a path planning algorithm and the environmental map, and then moves according to the cleaning route. The cleaning robot 100 is equipped with a middle sweeping assembly or / and mopping assembly at the bottom, and the cleaning robot 100 can clean the surface in the moving path through the middle sweeping assembly or / and mopping assembly.
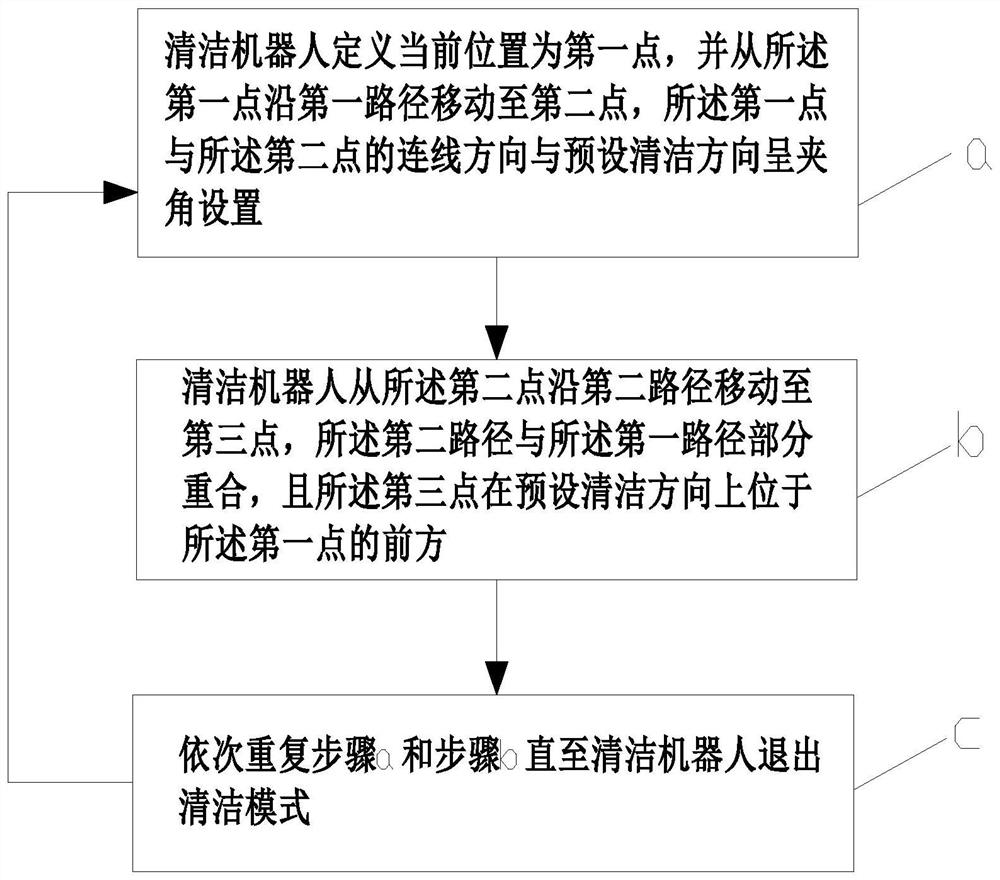
[0046] The cleaning mode includes steps:
[0047] a. The cleaning robot 100 defines the curren...
Embodiment approach 2
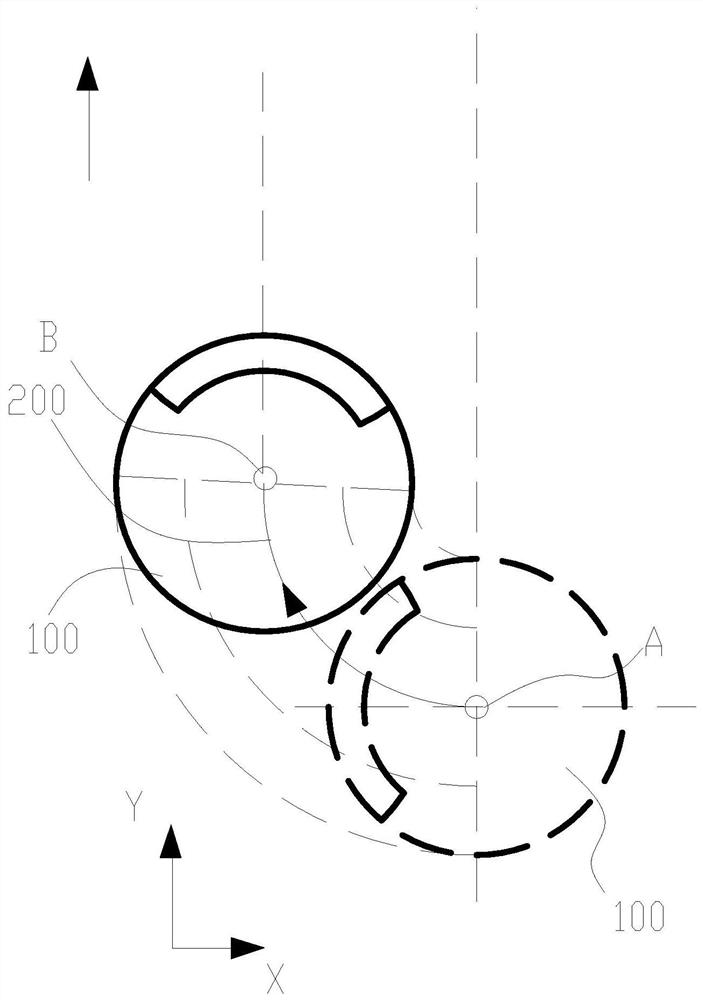
[0072] see Figure 12 to Figure 14 The main difference between the cleaning mode provided by the second embodiment and the cleaning mode provided by the first embodiment is that: in the step b, the second path 300 is tangent to the first path 200 at the second point B .
[0073] Wherein, the first path 200 is a straight path, and the second path 300 is an arc path; or, the first path 200 is an arc path, and the second path is a straight path; or, the first path 300 is an arc path, and the second path is a straight path; Both the path 200 and the second path 300 are arc paths.
[0074] The cleaning area of the cleaning robot 100 on the first path 200 and the cleaning area of the cleaning robot 100 on the second path 300 near the second point B have a high degree of coincidence, so that the area near the second point B The repeated cleaning area is large, and the reciprocating cleaning effect is realized.
[0075] Optionally, in step a, the cleaning robot 100 moves forwar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com