Intelligent trolley positioning and navigation method and system based on laser radar and speedometer SLAM
A laser radar and smart car technology, applied in two-dimensional position/channel control, control/adjustment system, vehicle position/route/height control, etc., can solve problems such as limited functions, unsatisfactory positioning effect, and few experimental platforms , to achieve high accuracy, realize the effect of automatic positioning and navigation of the car
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The overall idea of the technical solution provided by the present invention is as follows:
[0042] For the smart car to realize the positioning and navigation function in an unknown environment, it is necessary to obtain the location information of the surrounding environment based on the various sensors on the car to realize the SLAM function. The construction of the environmental map based on SLAM technology is the key to the movement of the car, which has an important theory. Analysis and practical application of research value.
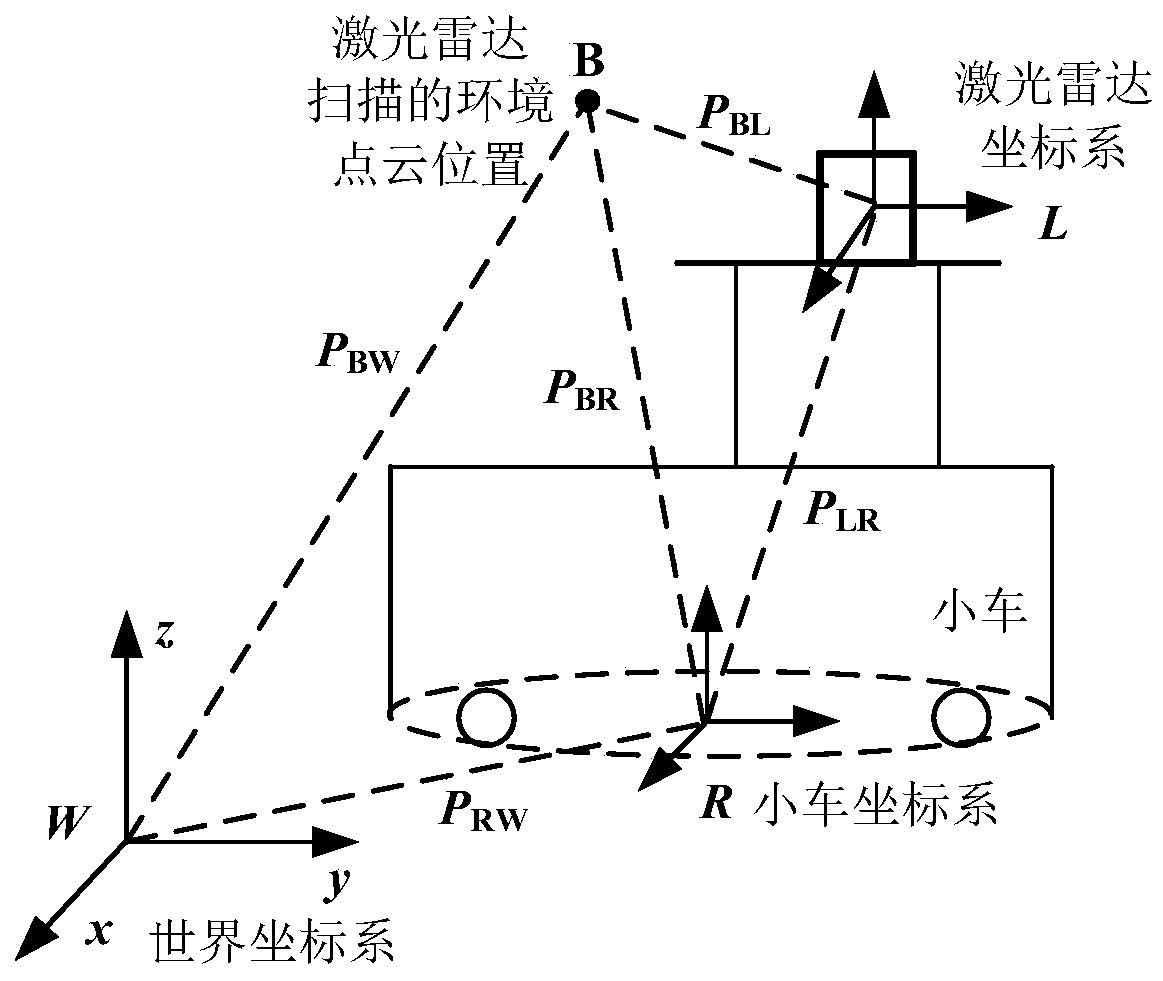
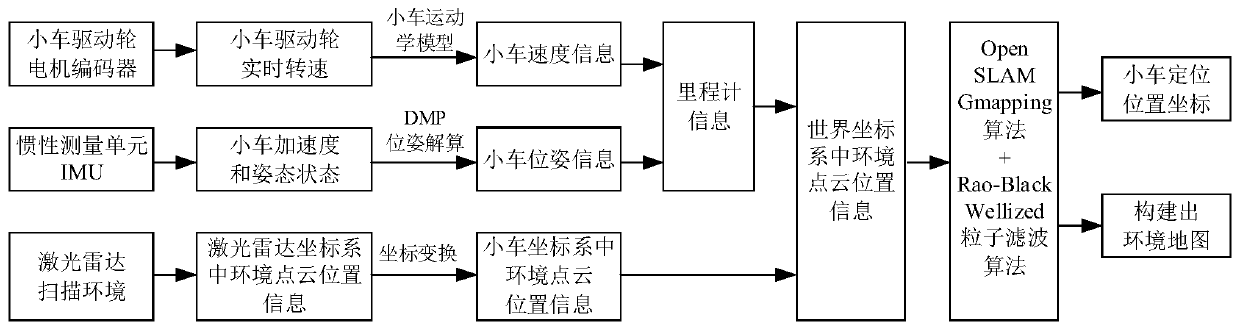
[0043] According to the positioning and navigation requirements of the moving car, the present invention constructs an intelligent car positioning and navigation system based on laser radar and odometer SLAM. According to the conversion relationship between the relevant coordinate systems, the point cloud position data of the surrounding environment of the car scanned by the lidar is converted into the world coordinate system, and then ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com