Vision robot motion control method based on reinforcement learning
A robot movement and enhanced learning technology, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as structural deformation, decrease in displacement accuracy, and changes in the machine's own attitude, and achieve the effect of improving the correct rate of operation and reducing the amount of deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
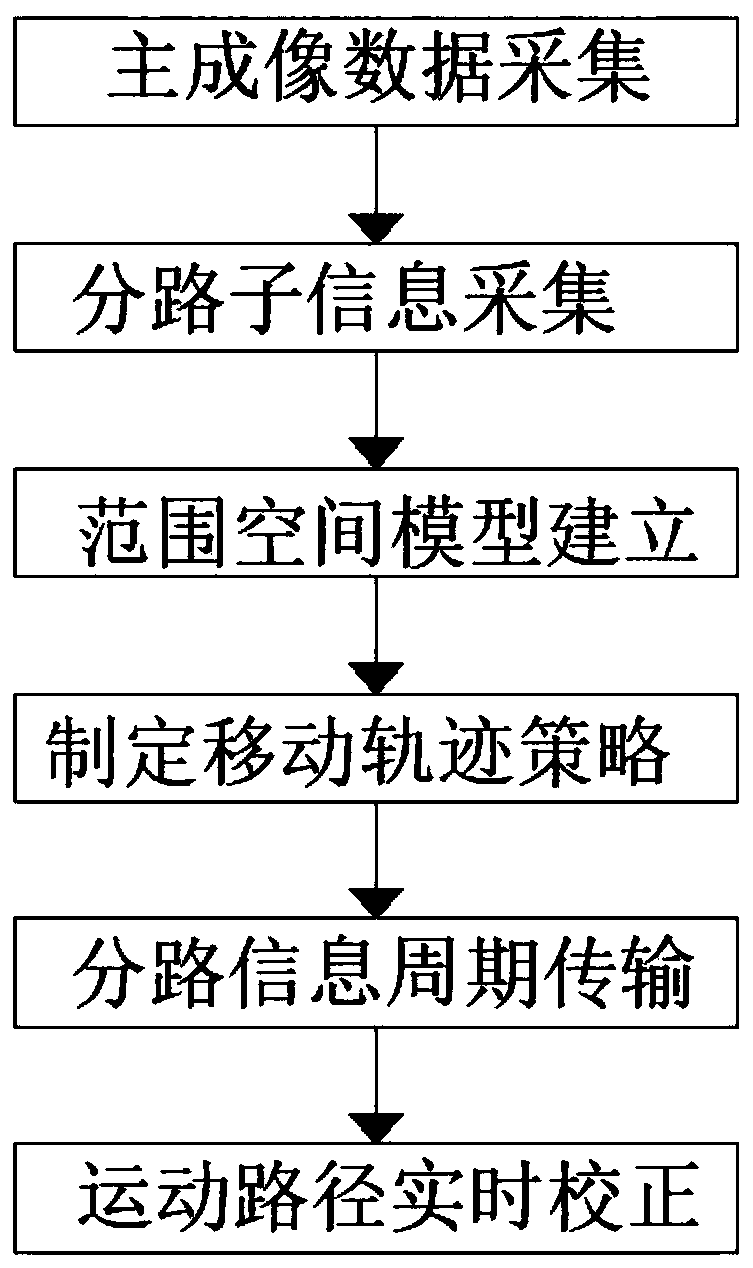
[0040] see figure 1 , a visual robot motion control method based on reinforcement learning, including:
[0041] Step 1: Main imaging data collection, the robot body uses the camera to collect information on its own position and target position respectively, and record the collected information in the built-in memory;
[0042] Step 2: Branch information collection, the robot body sends the target location information to the branch sub-probe, and uses multiple branch sub-probes in the peripheral to collect the path information of the robot body and the target position information separately, and uses the communication equipment to send the path information The information is transmitted to the robot itself;
[0043] Step 3: The range space model is established. The robot body fills and integrates the path information in the branch sub-probe with the position information recorded by its own camera, calls the algorithm module, and establishes the range space model. The 3D model r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com