AUV movable base alignment method and system based on outer product compensation
A technology of moving base alignment and moving base, which is applied in the direction of measuring devices and instruments, can solve the problems of filter divergence, error, and immature technology of moving base fine alignment, so as to improve calibration accuracy and eliminate instrument errors Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0023] The present invention will be described in further detail below in conjunction with the accompanying drawings.
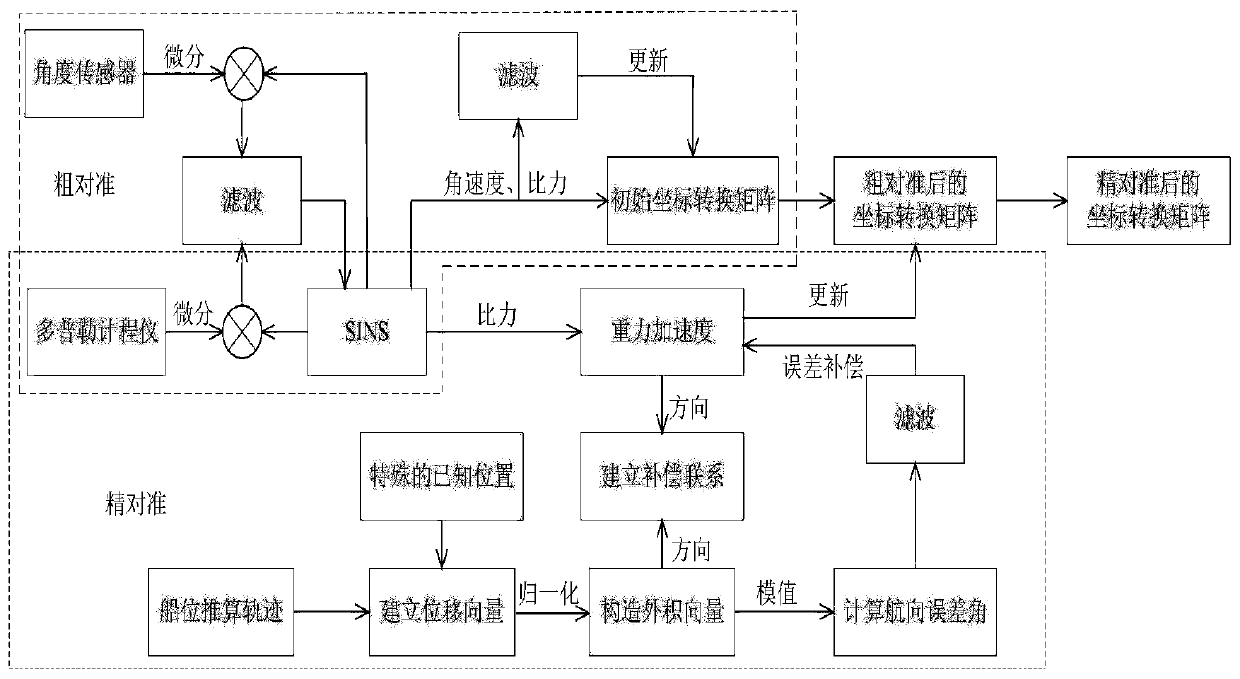
[0024] Such as figure 1 As shown, the present invention provides a method for aligning a moving base of an AUV based on outer product compensation, which specifically includes the following steps:
[0025] 1. Make the AUV complete the coarse alignment of the moving base at the starting point.
[0026] First obtain the direct measurement values of the gyroscope and accelerometer from SINS, and use the coordinate transformation relationship between the projection of angular velocity and specific force on the carrier coordinate system and their projection on the navigation coordinate system to calculate the initial coordinate transformation matrix Then the angle output by the angle sensor is differentiated to obtain the angular velocity, and the gyroscope is compensated, and the speed output by the Doppler log is obtained after the differential, and the accel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com