Robot pose positioning method and system
A positioning method and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as complex nonlinear systems and solution errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0038] Embodiment 1 of the present invention provides a pose positioning method.
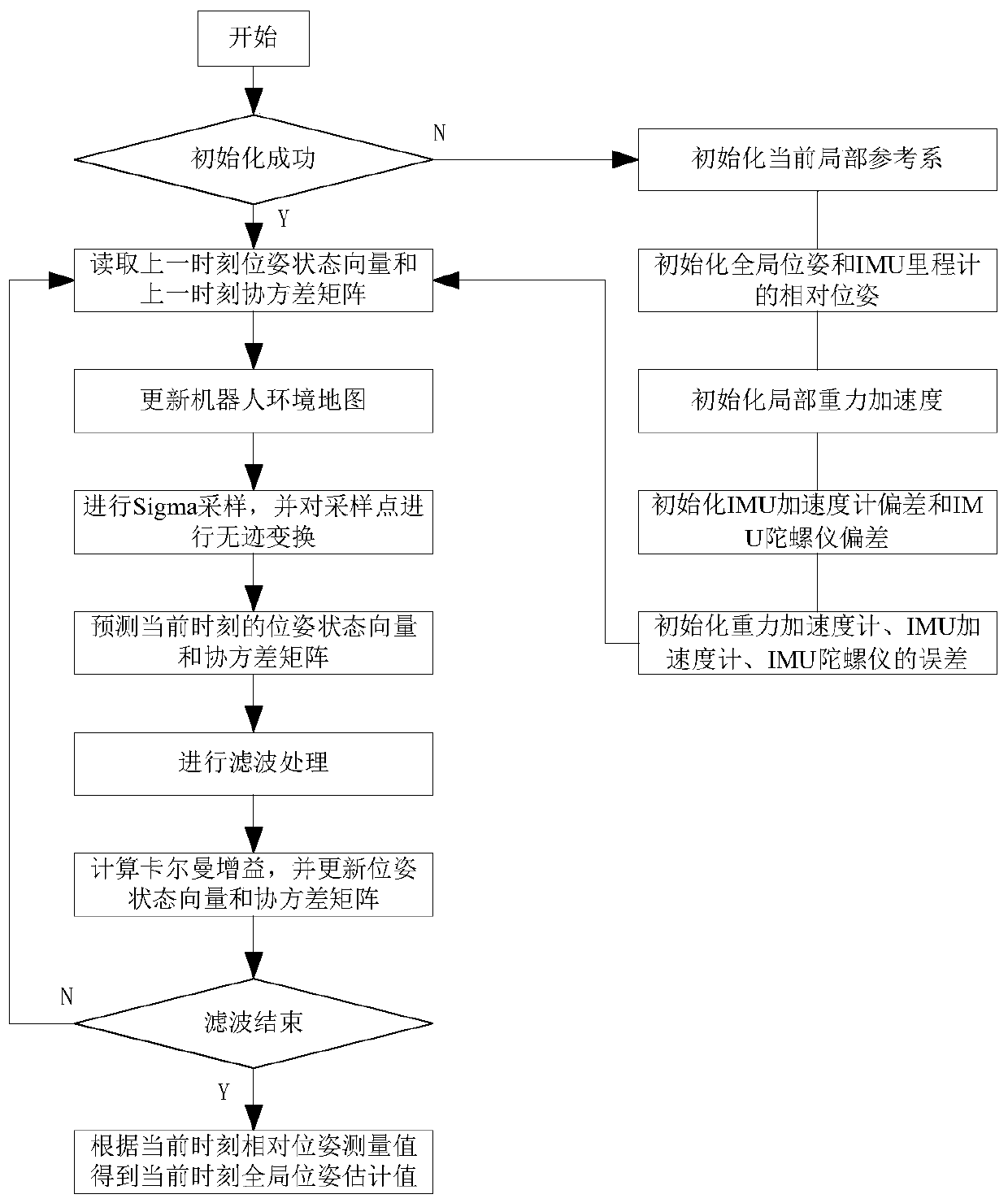
[0039] This embodiment adopts the unscented Kalman filter algorithm, which uses Sigma point sampling and unscented transformation to realize the approximation of the probability density distribution, which can retain high-order terms and improve the solution accuracy, but the premise of the unscented Kalman filter algorithm is that The system noise variance matrix Q and the observation noise variance matrix R, in practical applications, the mathematical models of the two are difficult to construct, or they change every moment, and cannot be accurately described. If the unscented Kalman filter algorithm is directly used, it may lead to the solution The local optimal state estimation of the mobile robot finally causes a large error in the positioning result of the mobile robot.
[0040] Therefore, in this embodiment, the IMU odometer is used as the local reference system, and the data collected by...
Embodiment 2
[0120] This embodiment provides a robot pose positioning system, which is used to implement the method described in Embodiment 1, such as image 3 As shown, it is a structural block diagram of the robot pose positioning system of this embodiment, including:
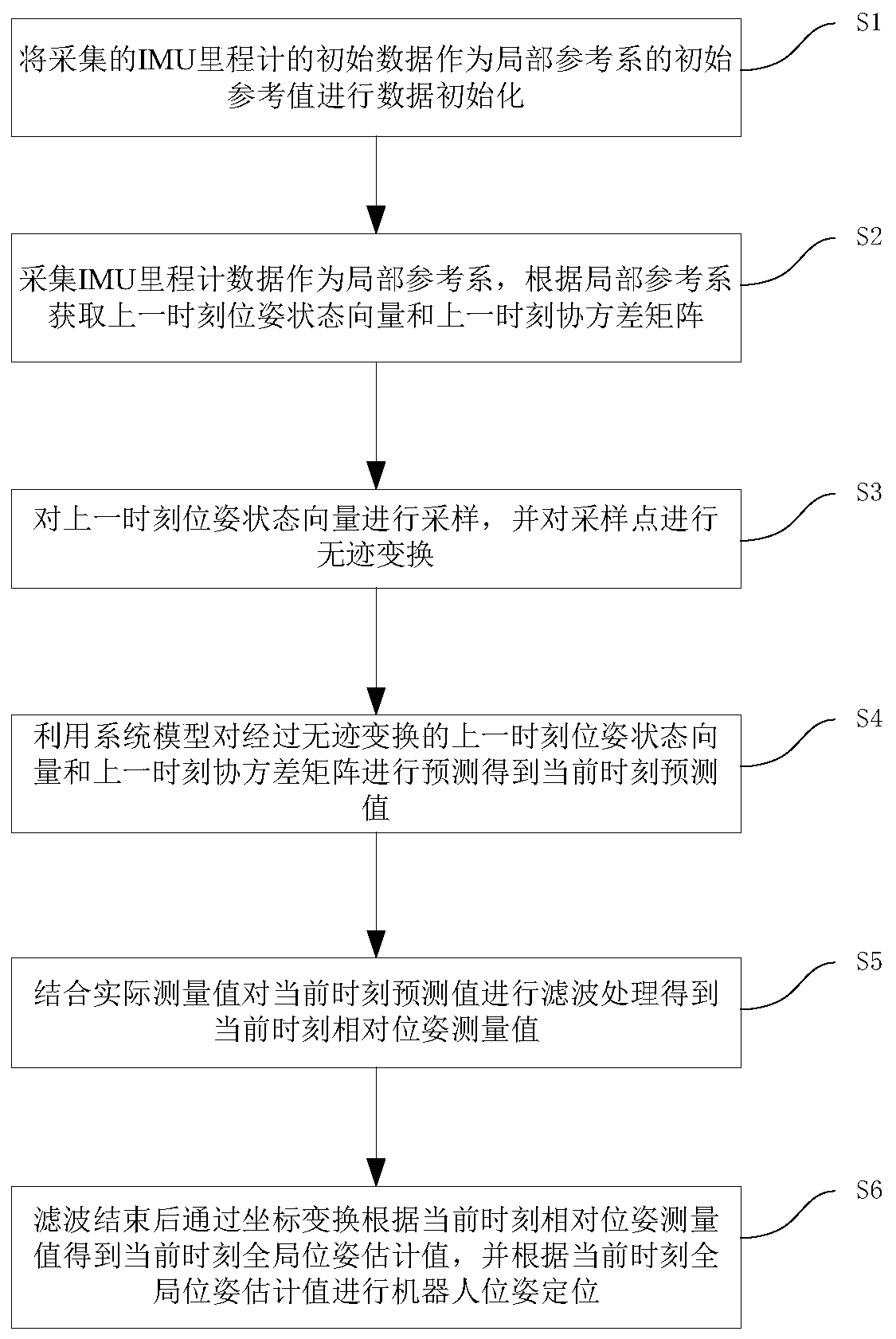
[0121] Acquisition module 100: used to collect IMU odometer data as a local reference system, and obtain the previous moment pose state vector and the previous moment covariance matrix according to the local reference system;
[0122] Sampling module 200: for sampling the pose state vector at the last moment, and performing unscented transformation on the sampling points;
[0123] Prediction module 300: used to use the system model to predict the unscented transformed last moment pose state vector and last moment covariance matrix to obtain the current moment prediction value, the current moment prediction value includes: the current moment pose state vector and the covariance matrix at the current moment;
[0124] Filt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com