Three-dimensional space maneuvering bionic robot fish and buoyancy adjusting device
A three-dimensional space, buoyancy adjustment technology, applied in the direction of motor vehicles, transportation and packaging, ships, etc., can solve the problems of weak three-dimensional space movement ability, difficult to realize robotic fish, poor flexibility, etc. To the effect of movement flexibility, improve efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following examples describe the present invention in more detail.
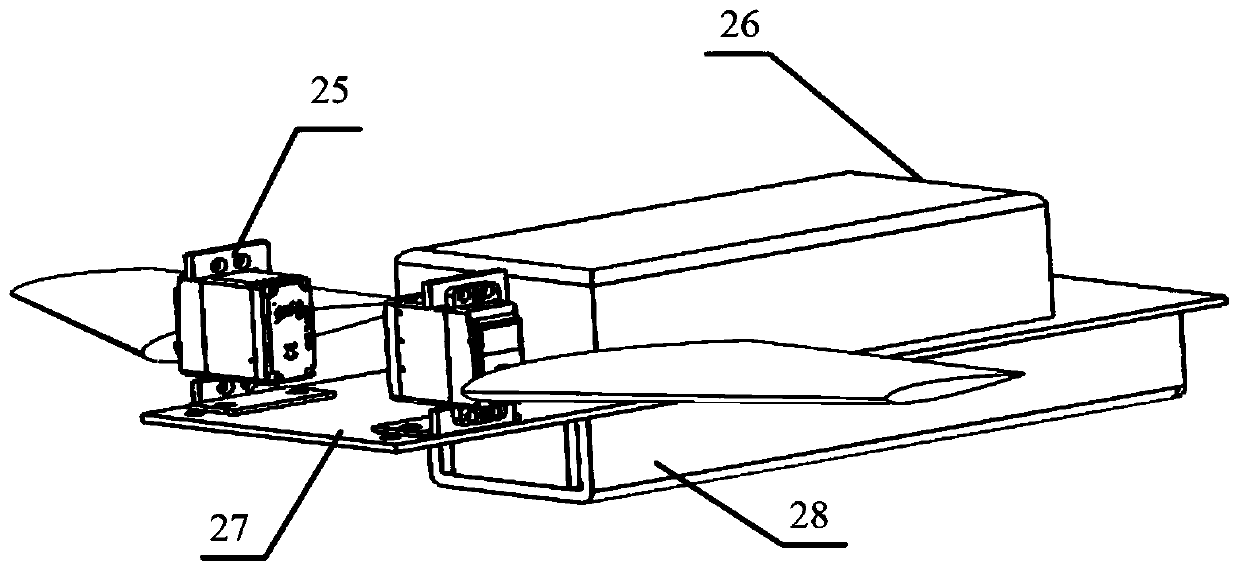
[0024] combine Figure 5 , The buoyancy adjusting device of the present invention comprises a buoyancy cylinder 48 and a volume adjustment mechanism arranged in the buoyancy cylinder. The volume adjustment mechanism comprises a stepper motor 42, a leading screw 45, a movable support 46, and a piston 43. One end of the movable support is fixedly connected to the piston, and the other end is fixedly connected to a disc with threaded holes in the middle. The two stepper motors The tail is fixedly connected, and a lead screw is connected to the output shaft of each stepper motor, and the lead screw matches the threaded hole of the disc. Two stepping motors 42 can work independently, and there are threads on the movable support 46 discs. When the stepping motor 42 rotates, it drives the leading screw 45 to rotate, thereby driving the movable support 46 to move left and right, and the movable support 46 ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap