Route dynamic allocation method, equipment and medium for unmanned sweeper
An unmanned, dynamic distribution technology, applied in the field of sweepers, can solve problems such as incompletion and delay in operation, and achieve the effect of efficient cleaning process and avoid delay or incompletion of operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Hereinafter, the present invention will be further described with reference to the accompanying drawings and specific embodiments. It should be noted that, on the premise of no conflict, the embodiments or technical features described below can be arbitrarily combined to form new embodiments. .
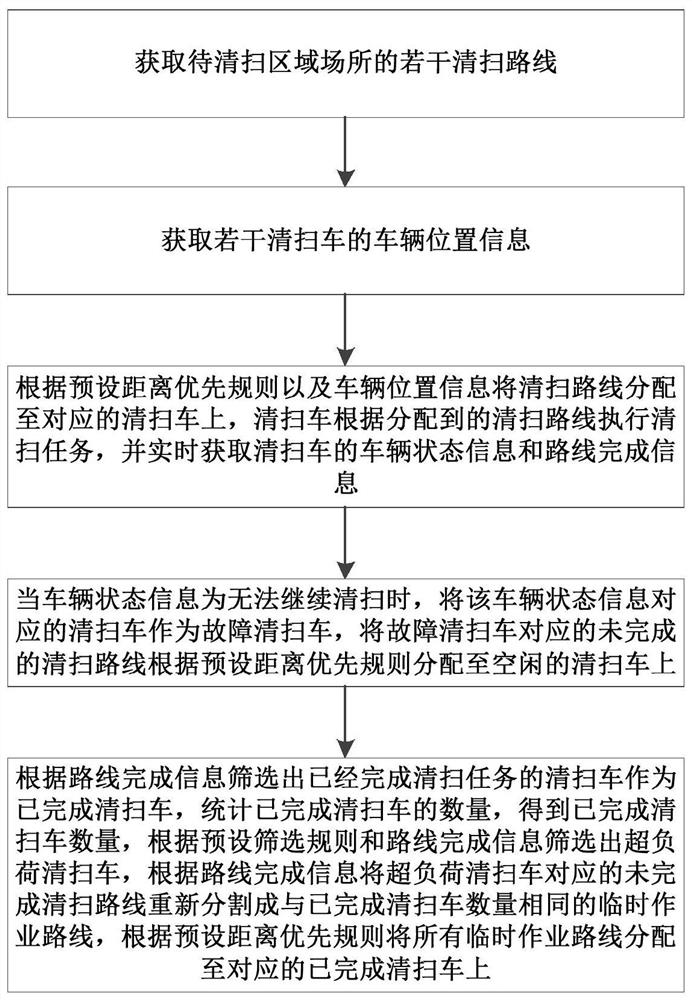
[0030] like figure 1 As shown, a dynamic route allocation method for an unmanned sweeper of the present invention includes the following steps:
[0031] Route acquisition, get several cleaning routes of the area to be cleaned;
[0032] The vehicle position acquisition is to acquire the vehicle position information of several sweepers; in this embodiment, the vehicle position information of each sweeper is obtained through the GPS positioning method.
[0033] In the initial allocation, the cleaning route is allocated to the corresponding sweeper according to the preset distance priority rules and vehicle location information. The sweeper performs the cleaning task according to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com