Dynamic calibration method for linearity of collision force measurement force sensor
A force sensor and dynamic calibration technology, which is applied in the direction of force/torque/power measuring instrument calibration/testing, measuring devices, instruments, etc., can solve the problem of not establishing a complete, consistent, and pulse-type force source that cannot guarantee the force condition and normality Situation and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
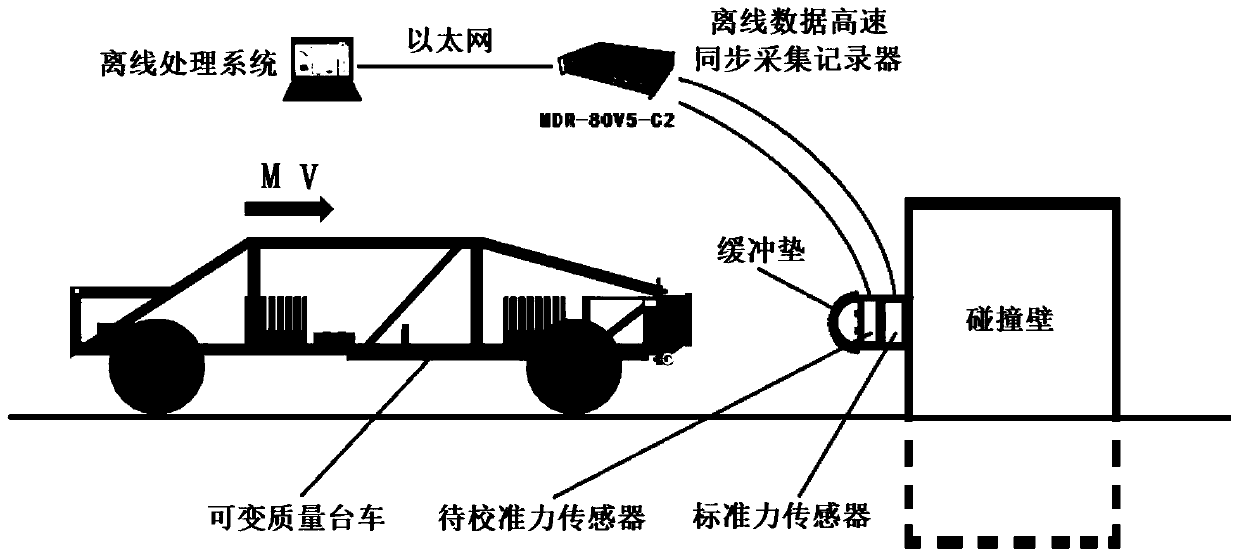
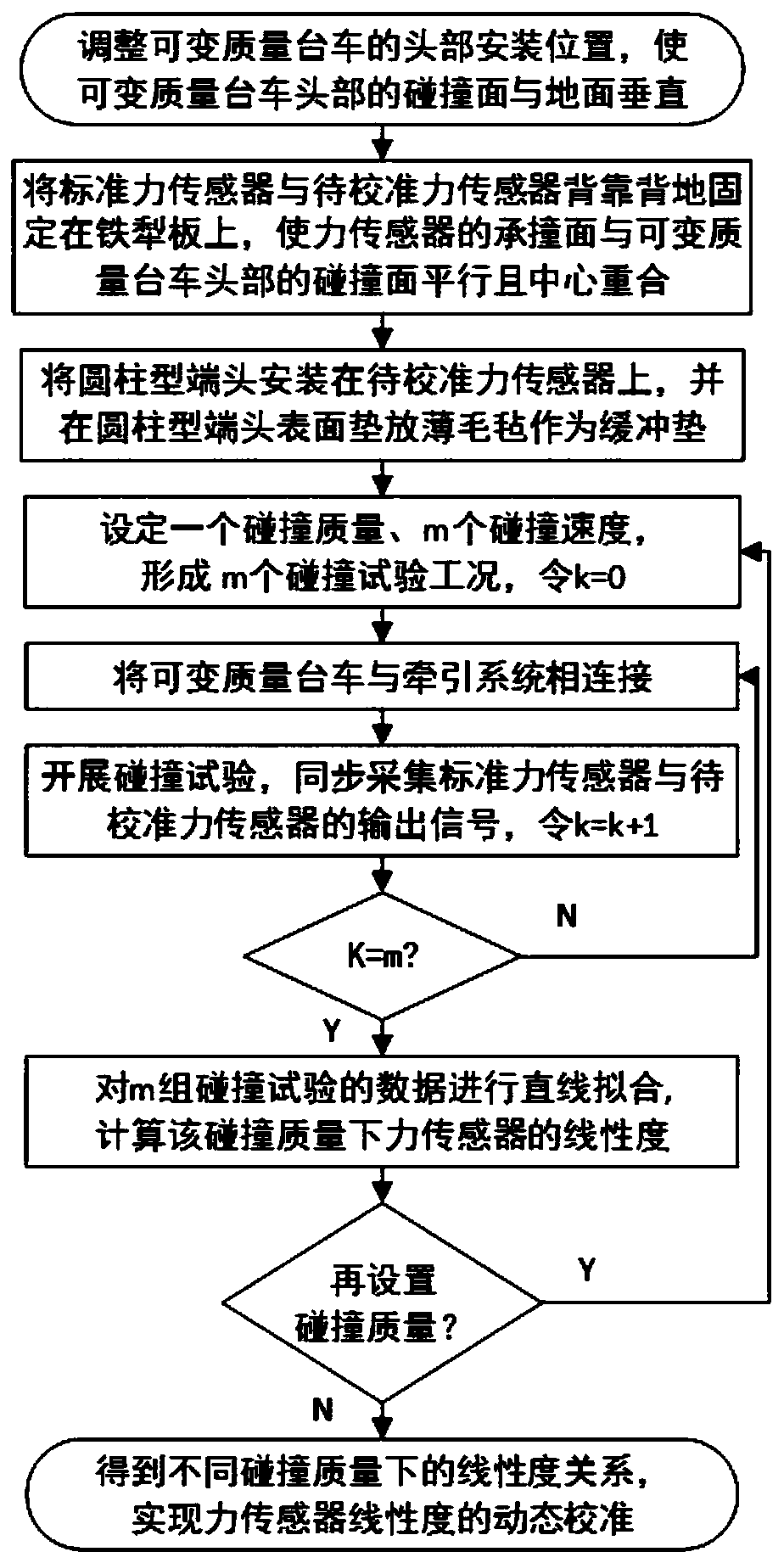
[0063] Embodiment 1, this embodiment discloses a dynamic calibration method for the linearity of the force sensor used to measure the impact force. The schematic diagram of the dynamic calibration system is as follows figure 1 As shown, the flow chart of the dynamic calibration method is as follows figure 2 As shown, the specific implementation steps are as follows:
[0064] S1: By padding different thicknesses and different numbers of spacers between the variable mass trolley and its head, the collision surface of the variable mass trolley head is perpendicular to the ground.
[0065] S2: Use the order of placing the standard force sensor close to the iron plowboard, and the force sensor to be calibrated close to the standard force sensor, and rigidly connect the force sensor to be calibrated and the standard force sensor to the iron plow in a back-to-back horizontal stacking manner board. By placing different thicknesses and different numbers of gaskets at different posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com