ICP point cloud map fusion method, system and device based on multi-unmanned aerial vehicle cooperation and storage medium
A map fusion and multi-UAV technology, applied in the field of UAV, can solve the problems affecting the convergence speed of the algorithm, increasing the time complexity, etc., and achieve good technical effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
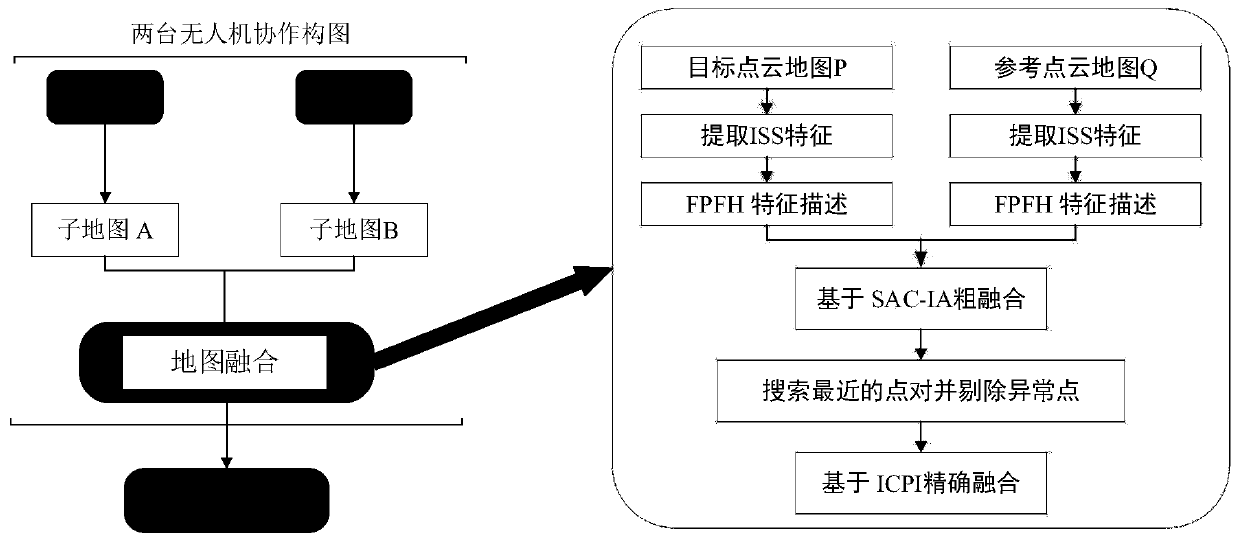
[0064] In view of the limitations of the single UAV SLAM algorithm and the disadvantages of the distributed and centralized methods. Using the combination of multi-UAV system and visual SLAM, the invention starts from the centralized algorithm design, and the invention discloses an ICP point cloud map fusion method based on multi-UAV cooperation.
[0065] Specific instructions are given below:
[0066] 1. Introduction to the problem:
[0067] Point cloud registration includes manual registration, instrument-dependent registration, and automatic registration. The automatic registration technology of point cloud uses a certain algorithm or statistical law to calculate the misalignment between two point clouds by computer, so as to achieve two The essence of the effect of automatic registration of block point clouds is to transform the data point clouds measured in different coordinate systems into coordinate systems to obtain an overall data model. The key to the problem is how...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com