Method for estimating the reversely calculated control points of NURBS
A technology of control point and tool position point, which is applied in the field of spline tool position trajectory fitting of numerical control technology, can solve the problems of low calculation efficiency and many calculation times, and achieve the effect of reducing calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
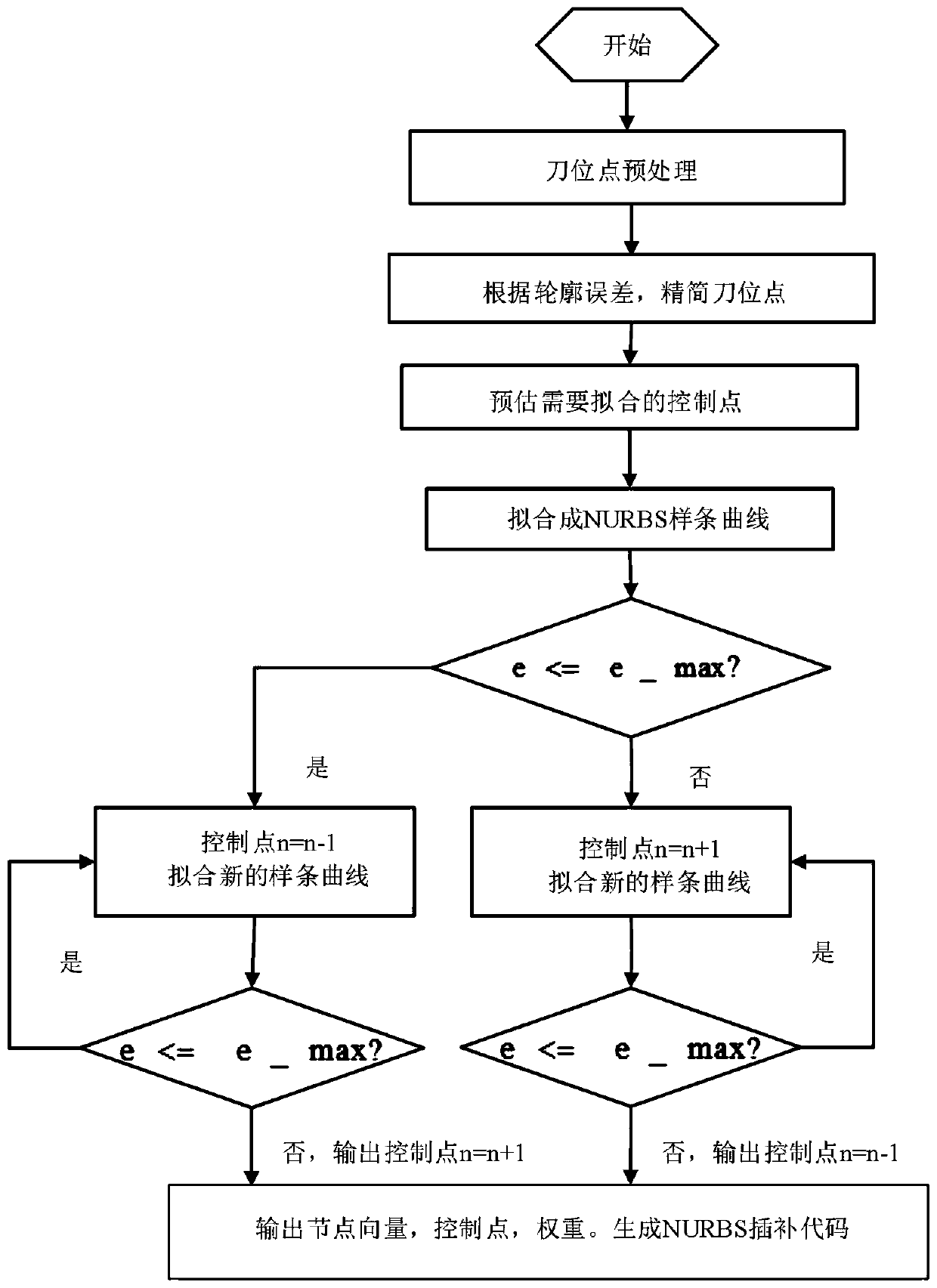
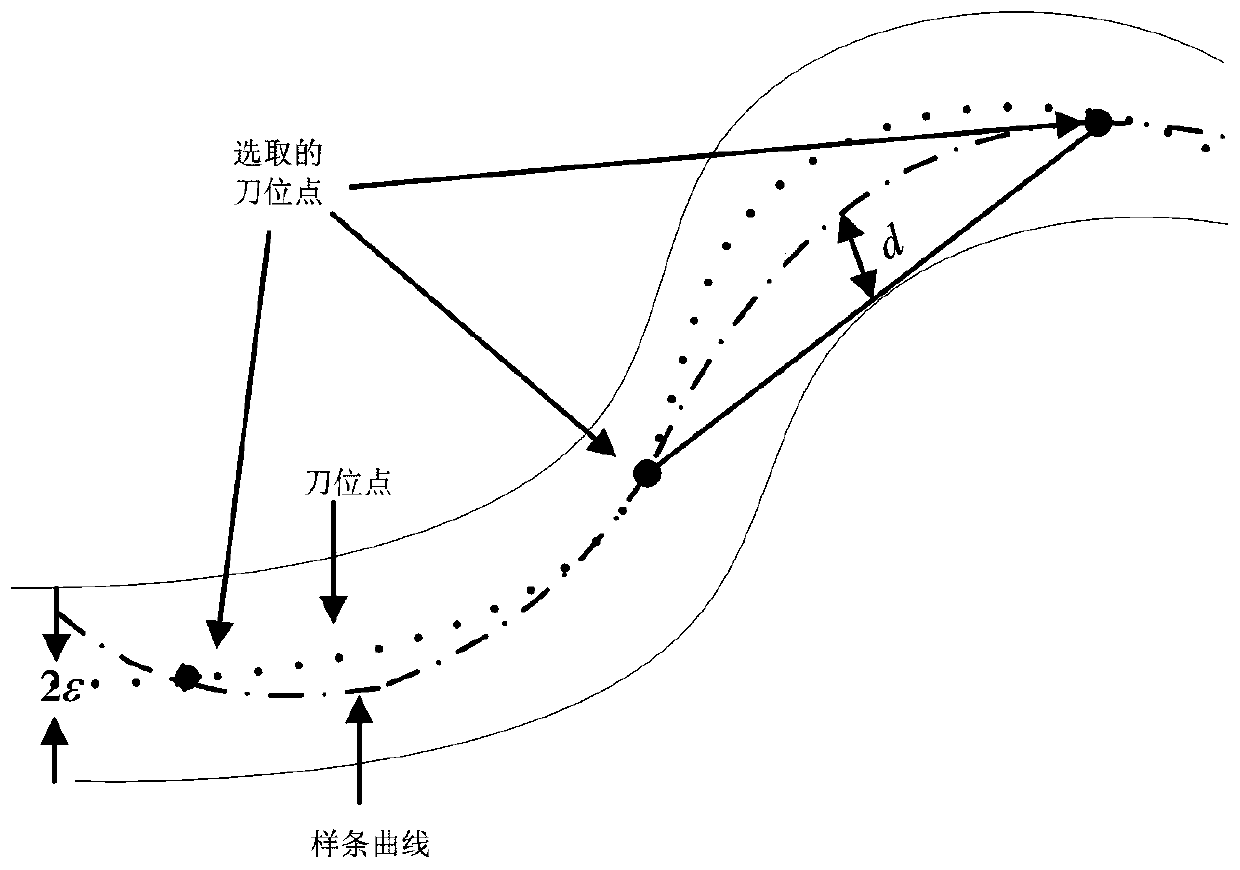
[0042] Step 1: According to the known tool location points and the contour error of the NURBS curve, the tool location points are simplified, and the tool location points representing the typical contour are selected;
[0043] Such as figure 2 As shown, enter the tool location point P 0 ,..., P n , Give contour error d r As a control factor. Let P k Point is the starting point, P j As the end point, where 0≤k≤j-2 and k+2≤j≤n. Pick the middle point P i , Ki To the straight line P k P j The error d. Compare d with threshold d r , If d is greater than d r , Continue to search down, otherwise save P j Point to P k =P j As a new starting point, P j =P j+2 As the new end point, continue searching.
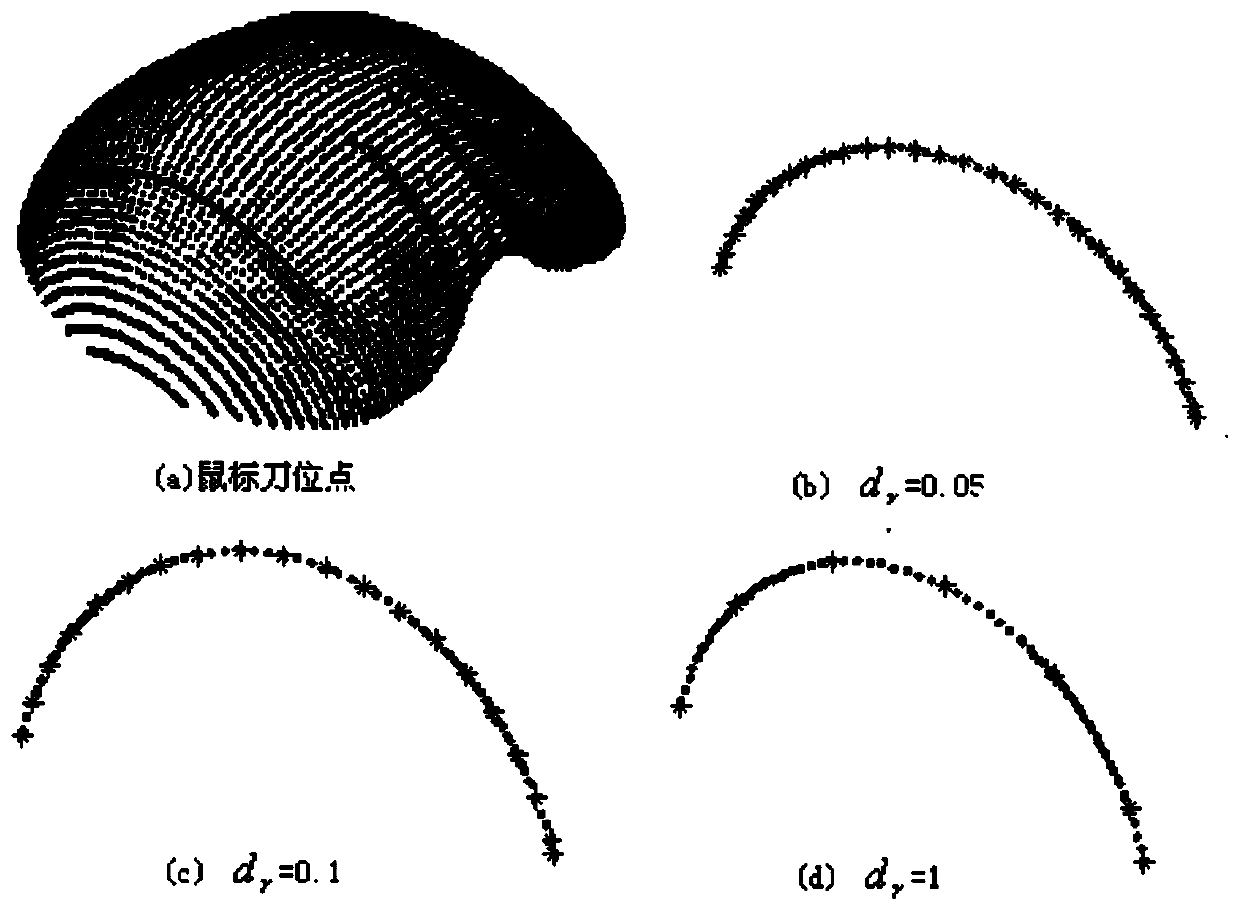
[0044] Such as image 3 As shown, a mouse tool position point is taken as an example, and different contour errors are used as thresholds to obtain different simplified tool position points.
[0045] Step 2: Take the simplified back tool position point as the initial value, usually the simpl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com