Four-rotor 3D path tracking method based on nonlinear PD double closed-loop control
A double-closed-loop control and path tracking technology, applied in non-electric variable control, vehicle position/route/height control, control/regulation system, etc., can solve problems such as unstable flight attitude and poor control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
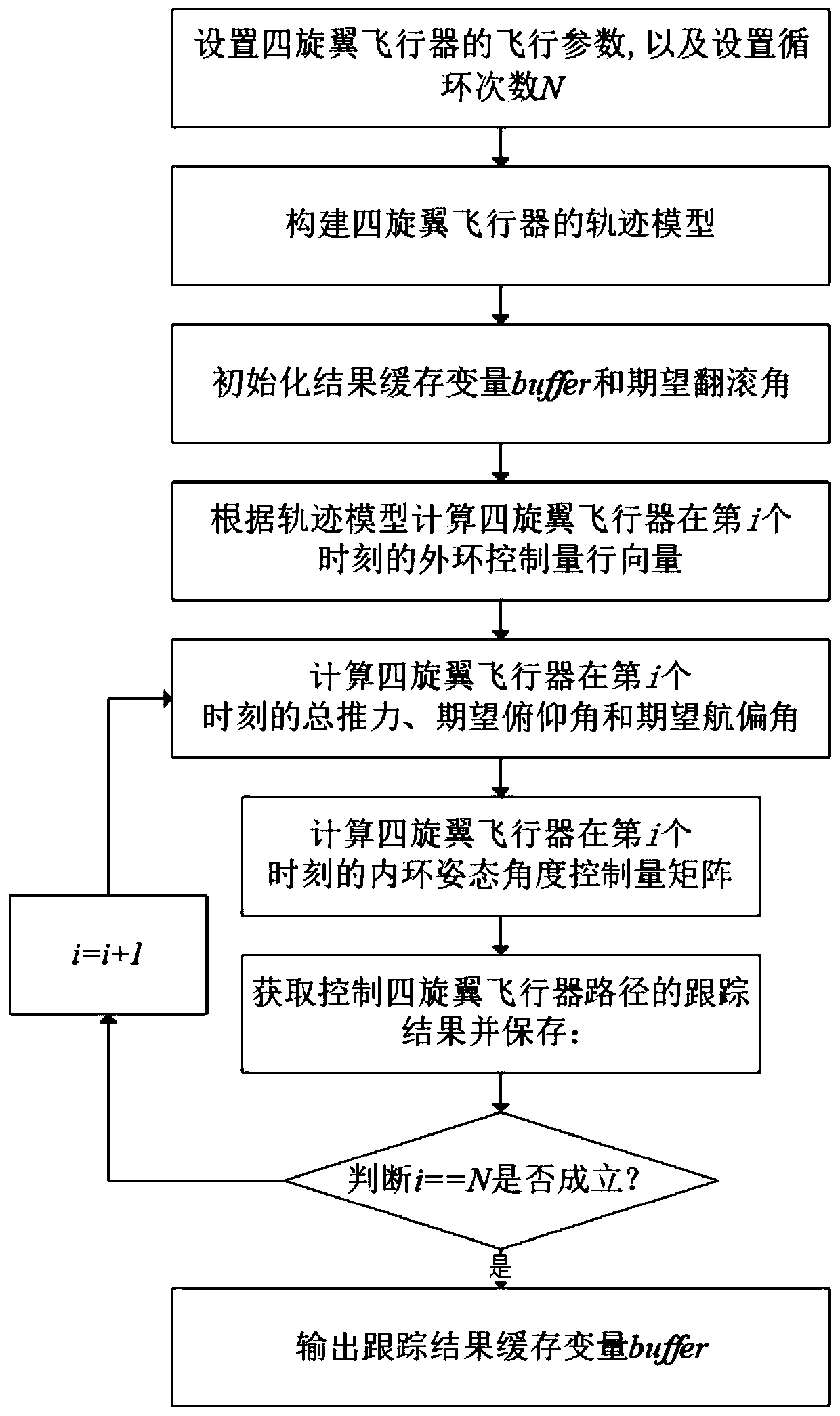
[0057] refer to figure 1 , the present invention comprises the following steps:
[0058] Step 1) Set the flight parameters of the quadrotor:
[0059] Divide the total flight time of the quadrotor aircraft in 3D space into N time periods, and obtain a set T={t including N+1 time points 0 ,t 1 ,...,t i ,...,t N}, where t 0 is the starting time point, and t 0 = 0, t i is the i-th time point, N=500, and the duration between adjacent time points is Δt=0.01, establish a coordinate system including three directions of x, y, and z in 3D space, and set the quadrotor aircraft at t i The real pitch angle relative to the ground at all times is The angular velocity is The true roll angle is The angular velocity is The real yaw angle is The angular velocity is The position coordinates of the real trajectory The expected pitch ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com