Flight tracking control signal generating device and method based on Hilbert-Huang time grid reconstruction
A grid and time technology, applied in the direction of non-electric variable control, control/regulation system, three-dimensional position/course control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0102] The flight tracking control signal generation device based on Hilbert Huang time grid reconstruction provided in this embodiment, combined with the flight dynamics process of the aviation vehicle and the shortest time fast automatic flight tracking requirements, the optimal control strategy generation process of the aircraft can be used The following mathematical model description:
[0103] min J=t f
[0104] s.t.
[0105]
[0106] g i (u(t),x(t),t)=0,i=1,2,...,m e
[0107] g j (u(t),x(t),t)≤0,j=m e +1,...,m
[0108] u min ≤u(t)≤u max
[0109] Among them, t represents time, x(t) represents the state vector composed of aircraft altitude tracking error, flight speed and track inclination angle,
[0110] is the first derivative of x(t); u(t) represents the control vector of the aircraft;
[0111] f(u(t),x(t),t) is the aircraft dynamics mathematical model; t 0 Indicates the initial moment of aircraft tracking control,
[0112] x 0 for t 0 The initial ...
Embodiment 2
[0187] The method for generating the flight tracking control signal based on Hilbert-Huang time grid reconstruction provided in this embodiment specifically includes the following steps:
[0188] Step A1: the aircraft enters the automatic flight tracking mode, and the aircraft's central control MCU14 reads the aircraft parameters and the aircraft dynamics model parameters set in the tracking state input unit 15, as well as the corresponding performance parameter constraint function values and the ATC state tracking command value;
[0189] Step A2: Aircraft flight altitude tracking error measurement sensor 11, aircraft speed measurement sensor 12, aircraft track inclination measurement sensor 13 real-time measurement of aircraft altitude tracking error, flight speed and track inclination status and display in flight status display unit 16;
[0190] Step A3: The aircraft central control MCU14 automatically executes the internal Hilbert-Huang time grid reconstruction dynamic acc...
Embodiment 3
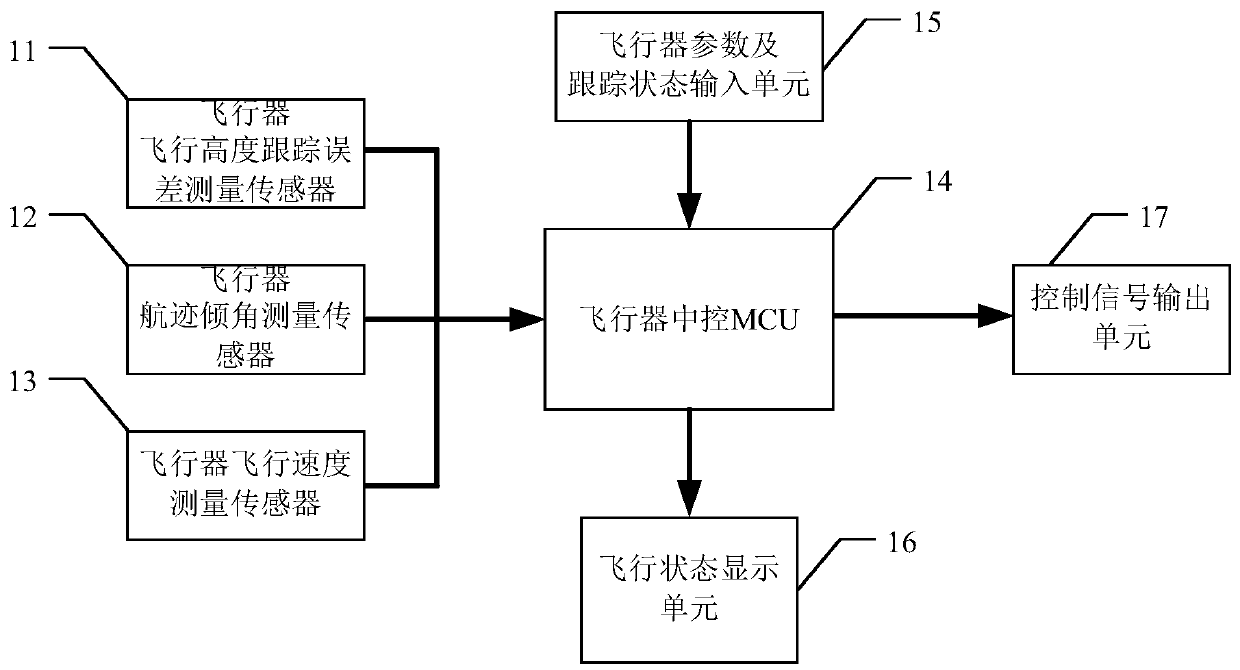
[0193] Such as figure 1 As shown, the flight tracking control signal generating device based on Hilbert Huang time grid reconstruction provided in this embodiment includes an aircraft flight height tracking error measurement sensor 11, an aircraft track inclination measurement sensor 12, and an aircraft speed measurement sensor 13 , aircraft central control MCU14, aircraft parameters and tracking status input unit 15, flight status display unit 16, control signal output unit 17.
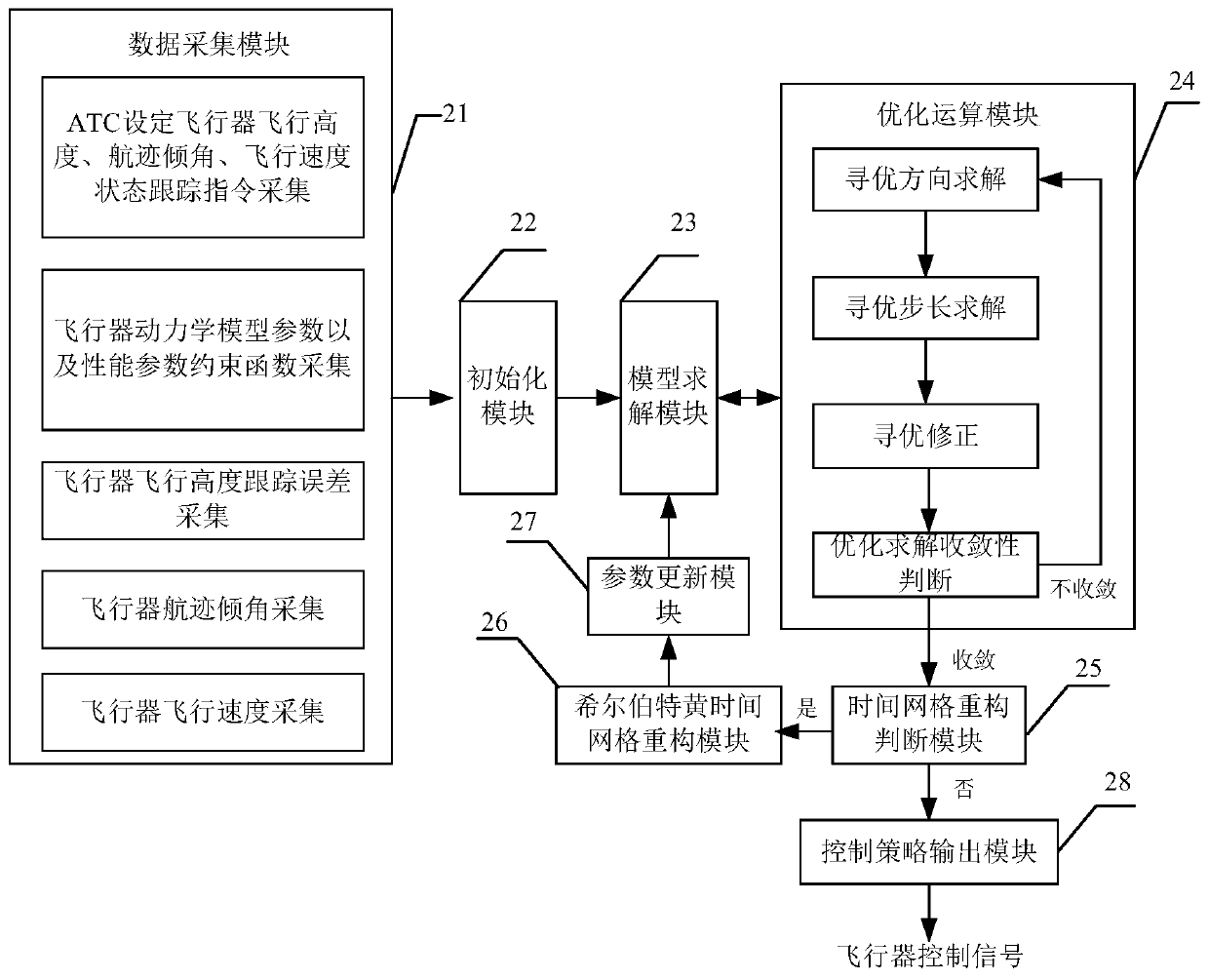
[0194] Such as figure 2 As shown, the control MCU of the aircraft includes a data acquisition module 21, an initialization module 22, a model solution module 23, an optimization operation module 24, a time grid reconstruction judgment module 25, and a Hilbert-Huang time grid reconstruction module 26 , a parameter update module 27, and a control strategy output module 28.
[0195] The data acquisition module includes ATC setting aircraft flight altitude, track inclination, flight speed state tracki...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com