Buoyancy adjusting device of AUV (autonomous underwater vehicle) and control method
A buoyancy adjustment and control method technology, applied in transportation and packaging, ships, special-purpose ships, etc., can solve the problems of energy waste, waste of working time, etc., to reduce energy consumption, prolong underwater working time, and reduce diving time. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings.
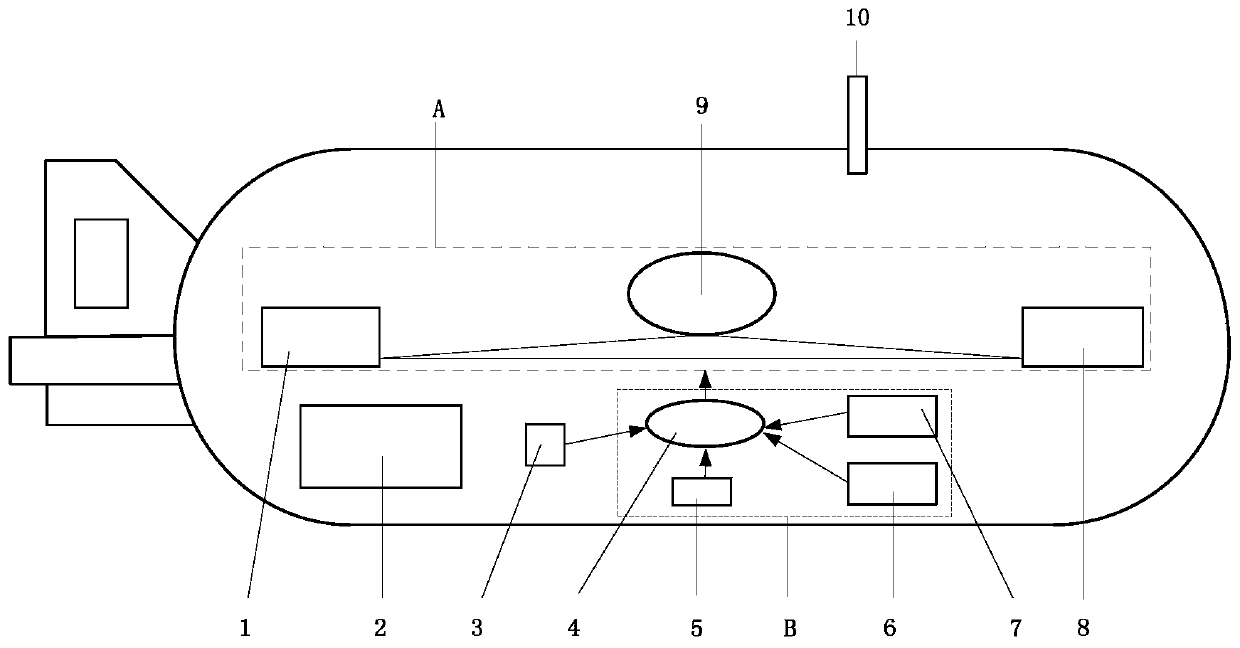
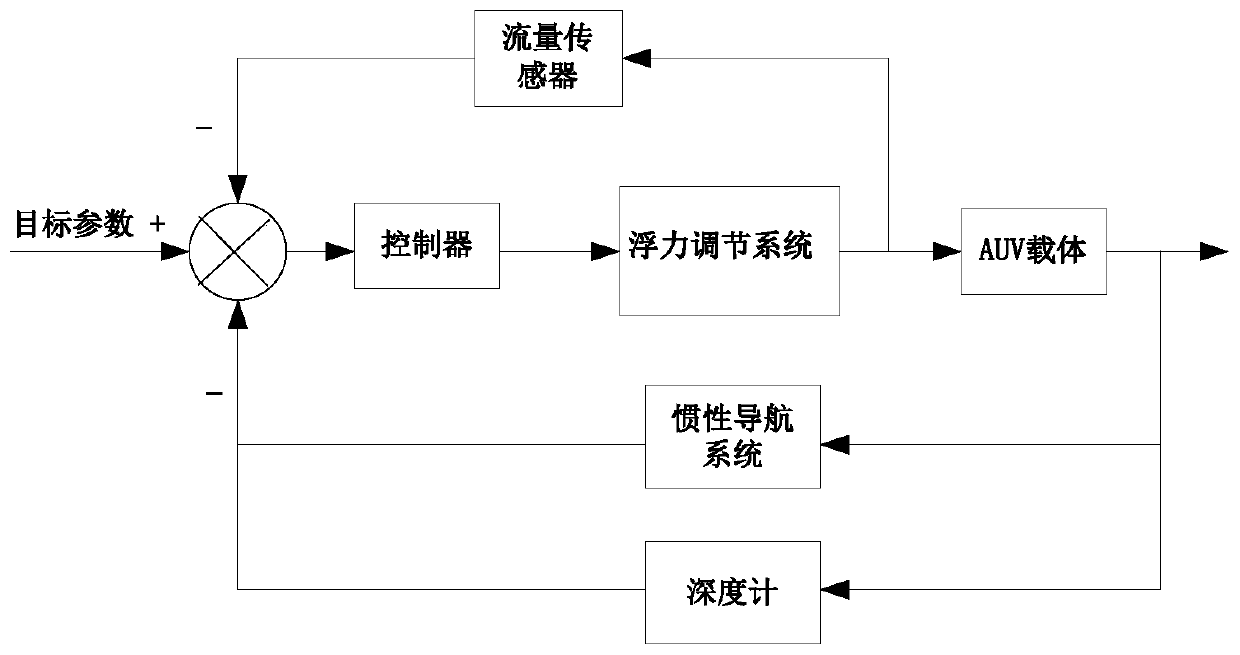
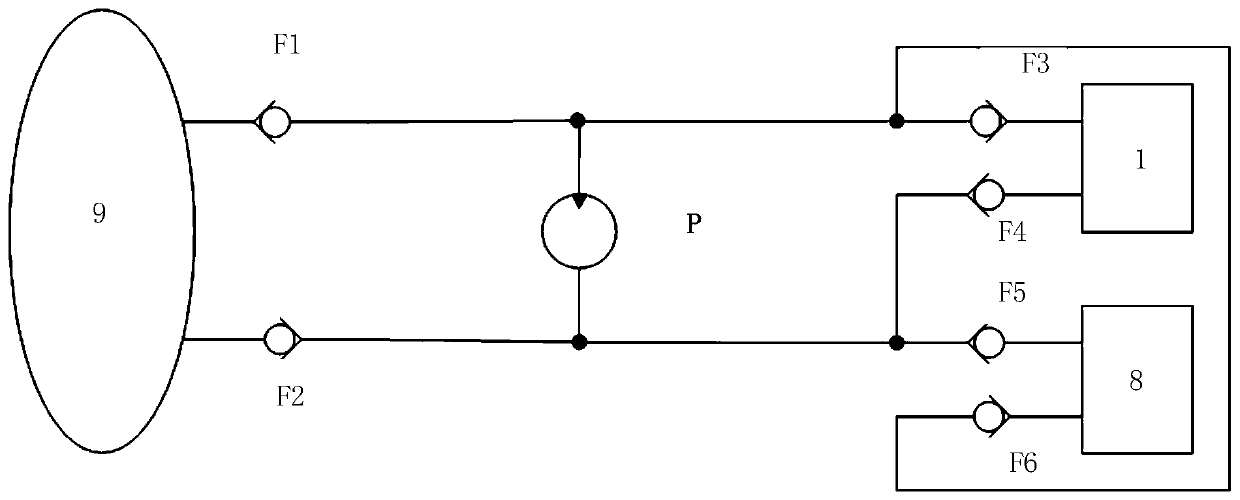
[0023] The invention provides a buoyancy adjusting device and a control method for an AUV to realize fast snorkeling movement. It is mainly composed of bow pressure fuel tank, battery, depth gauge, controller, radio station, Beidou satellite positioning system, inertial navigation system, stern pressure fuel tank, oil bag and combined antenna. The present invention realizes rapid surfacing and submerging of the AUV by effectively adjusting the volume of the oil bag of the AUV and the attitude of the AUV when surfacing and diving under the condition of known water depth and underwater environment. The advantage of the unpowered vertical snorkeling structure designed by the present invention is that the upstream area of the vertical surface is reduced when floating and diving, thereby reducing the vertical resistance. Under the condition of a certain buoyancy, it can f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com