AGV navigation angle compensation method and system, AGV and storage medium
A technology of angle compensation and deviation angle, which is applied in the field of AGV navigation angle compensation, AGV and storage media, can solve problems such as vehicle deviation, complex control, and influence on AGV's continued navigation accuracy, and achieve the effect of eliminating influence and high walking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
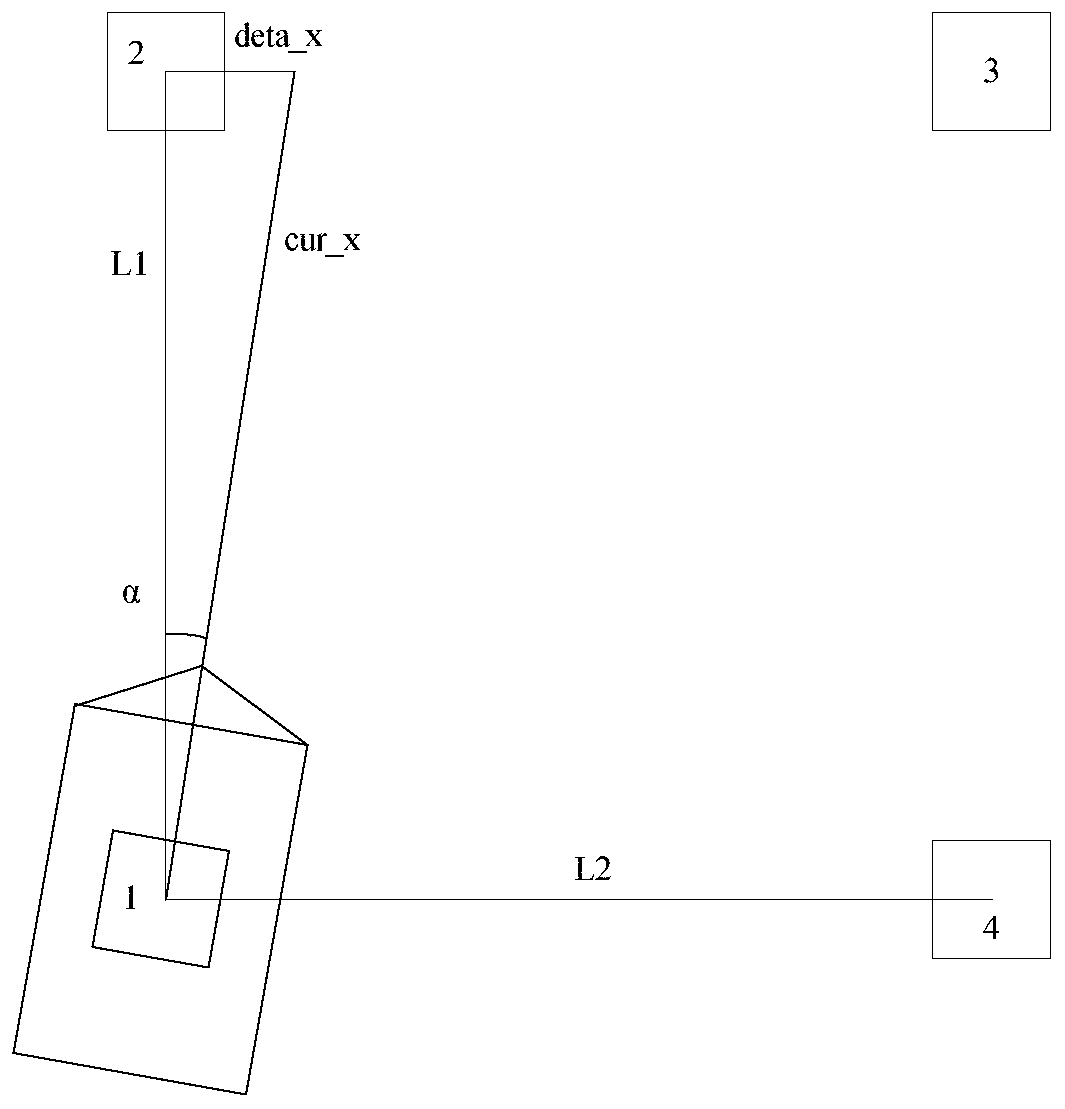
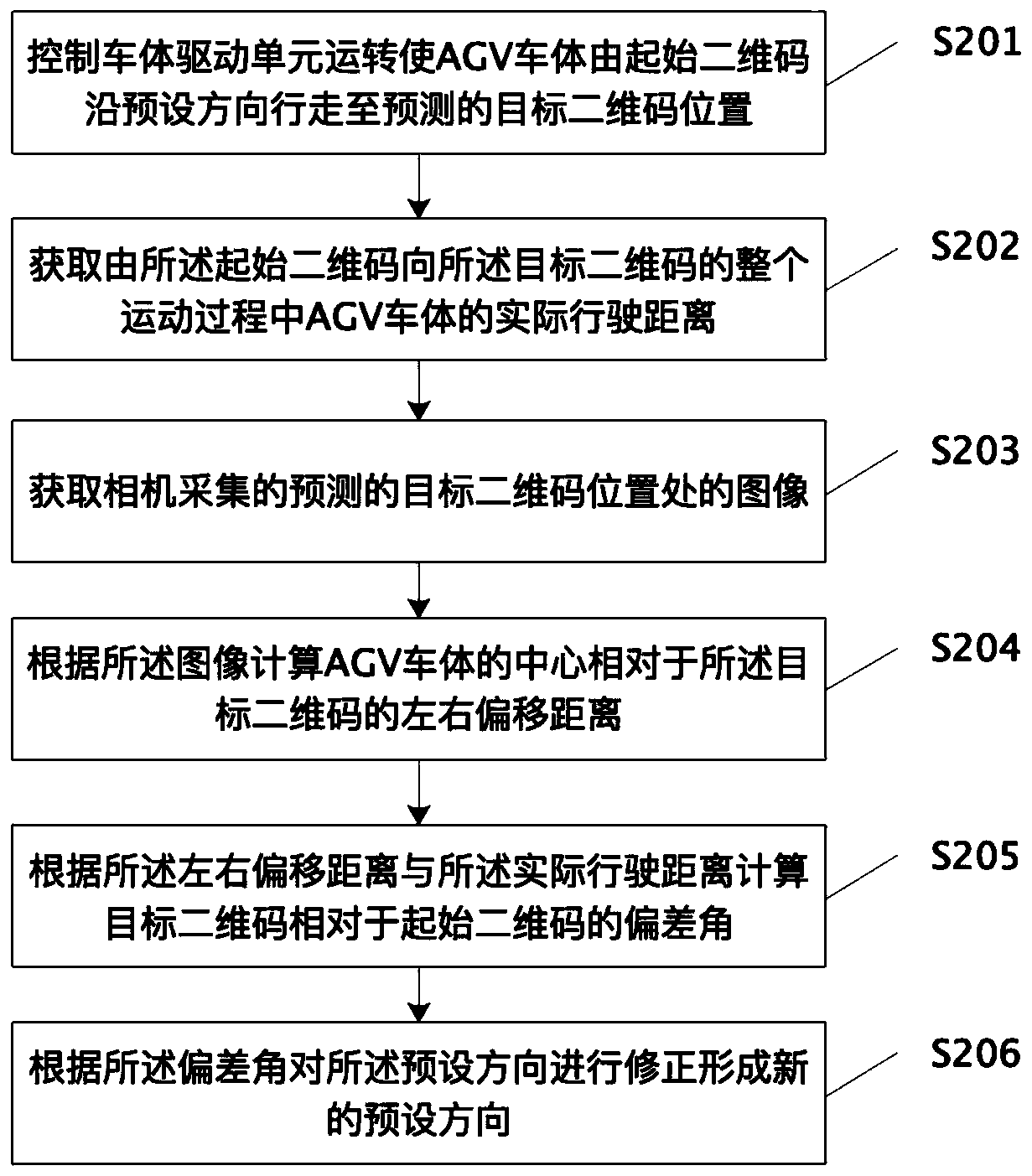
[0050] as attached image 3 The AGV navigation angle compensation method is applied to the control unit 104, and the method includes the following steps S201-S206:
[0051]Step S201, controlling the operation of the car body drive unit 102 so that the AGV car body 101 walks from the initial two-dimensional code along the preset direction to the predicted target two-dimensional code position;
[0052] In this step, the preset direction is the direction marked by the target two-dimensional code, and the AGV100 will align with this preset direction when it starts to walk, and the predicted target two-dimensional code position is the position of walking a set distance along the preset direction. For example: at the beginning, AGV100 is at the starting QR code. Before that, the navigation angle has not undergone any compensation, because the QR codes in the work area are arranged horizontally and vertically in a square array, so the default direction is starting The specific direc...
Embodiment 2
[0076] This embodiment provides an AGV navigation angle compensation system 500. The AGV navigation angle compensation system 500 may include or be divided into one or more program modules, one or more program modules are stored in a storage medium, and are controlled by one or more program modules. Executed by a plurality of processors to complete the present invention and realize the above-mentioned AGV navigation angle compensation method. The program module referred to in the embodiment of the present invention refers to a series of computer program instruction segments capable of completing specific functions, which is more suitable than the program itself to describe the execution process of the AGV navigation angle compensation method in the storage medium. The following description will specifically introduce the functions of each program module in this embodiment, as attached Figure 4 As shown, the AGV navigation angle compensation system 500 includes:
[0077] The ...
Embodiment 3
[0085] This embodiment also provides a computer-readable storage medium, such as flash memory, hard disk, multimedia card, card-type memory (for example, SD or DX memory, etc.), random access memory (RAM), static random access memory (SRAM), only Read memory (ROM), electrically erasable programmable read-only memory (EEPROM), programmable read-only memory (PROM), magnetic memory, magnetic disk, optical disk, server, App application store, etc., on which computer programs are stored, The corresponding functions are realized when the program is executed by the processor. The computer-readable storage medium in this embodiment is used to store the AGV navigation angle compensation system 500, and when executed by a processor, the AGV navigation angle compensation method of the present invention is realized.
[0086] The serial numbers of the above embodiments are for description only, and do not represent the advantages and disadvantages of the embodiments.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com