Flexible exoskeleton joint actuator capable of being clutched
An exoskeleton and actuator technology, applied in the field of intelligent mechanical joint rotary actuators, can solve problems such as inability to actively separate and rely on design parameters of parts, so as to reduce the possibility of information loss and improve safety and reliability , the effect of reducing complexity and weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to make the technical means and effects of the present invention easy to understand, the following describes the present invention in detail with reference to embodiments and drawings.
[0028]
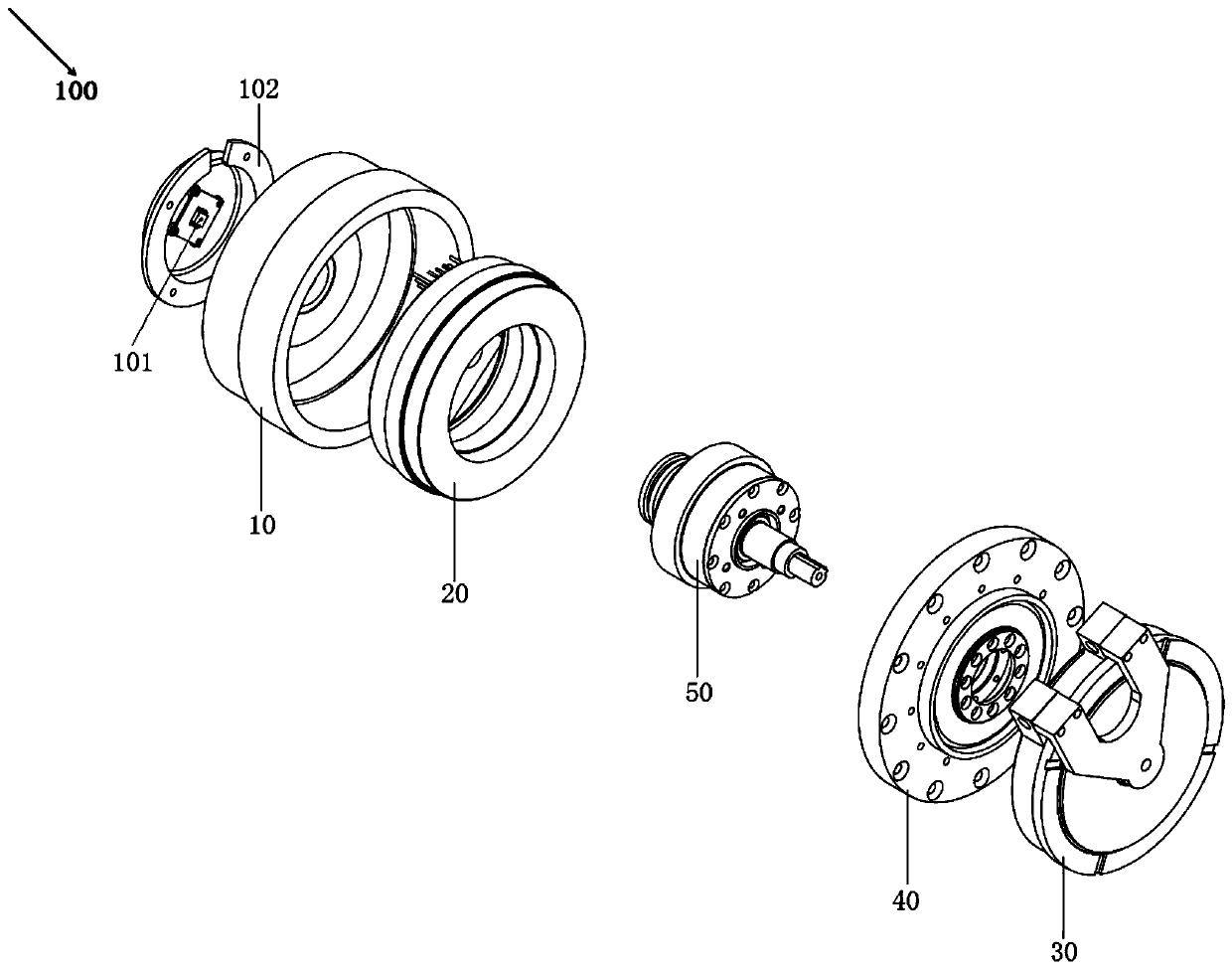
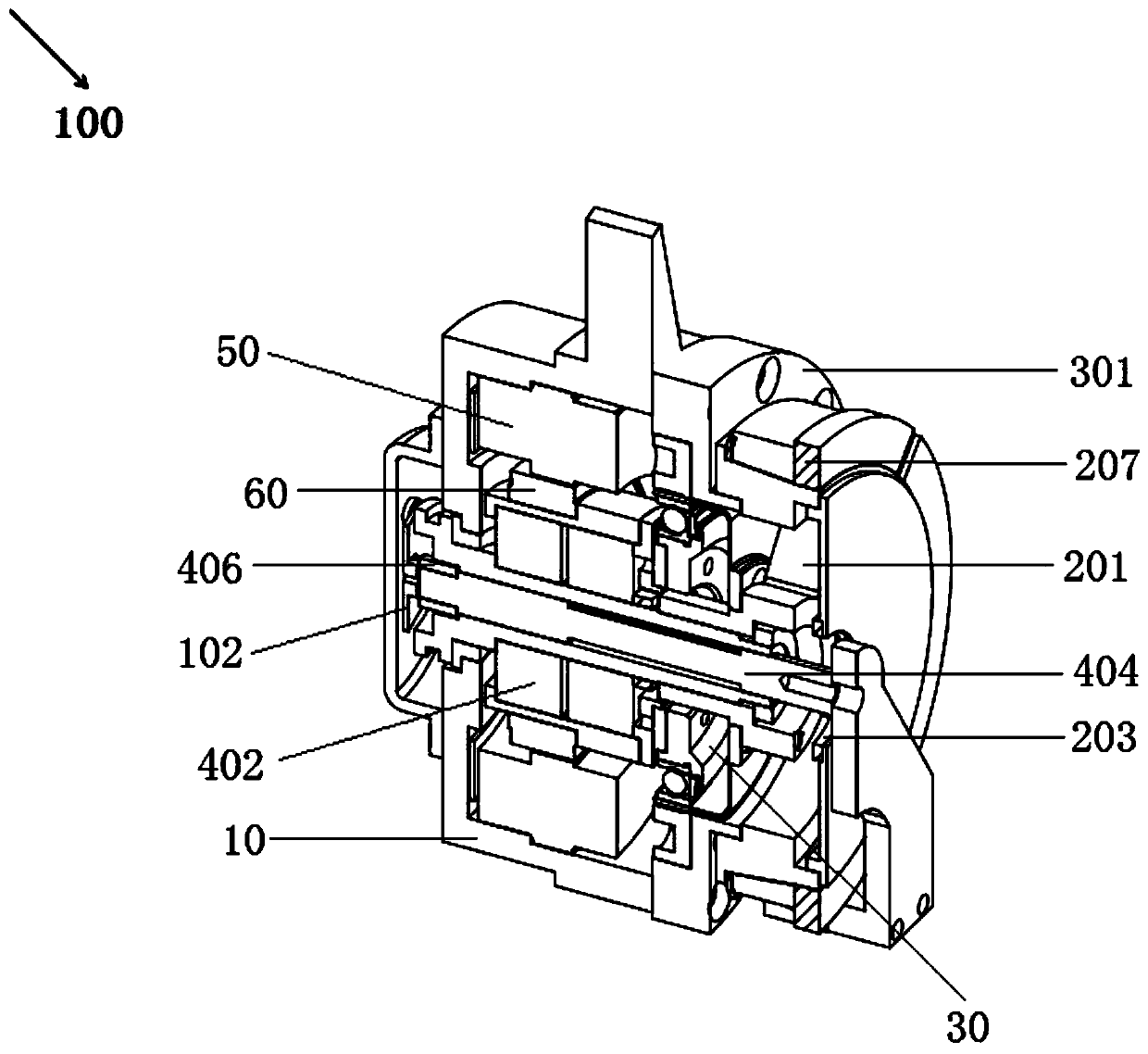
[0029] figure 1 It is a schematic diagram of the structure of the flexible clutchable exoskeleton joint actuator in the embodiment of the present invention, figure 2 It is an exploded schematic diagram of the flexible clutchable exoskeleton joint actuator in the embodiment of the present invention, image 3 It is a cross-sectional view of the flexible clutchable exoskeleton joint actuator in the embodiment of the present invention
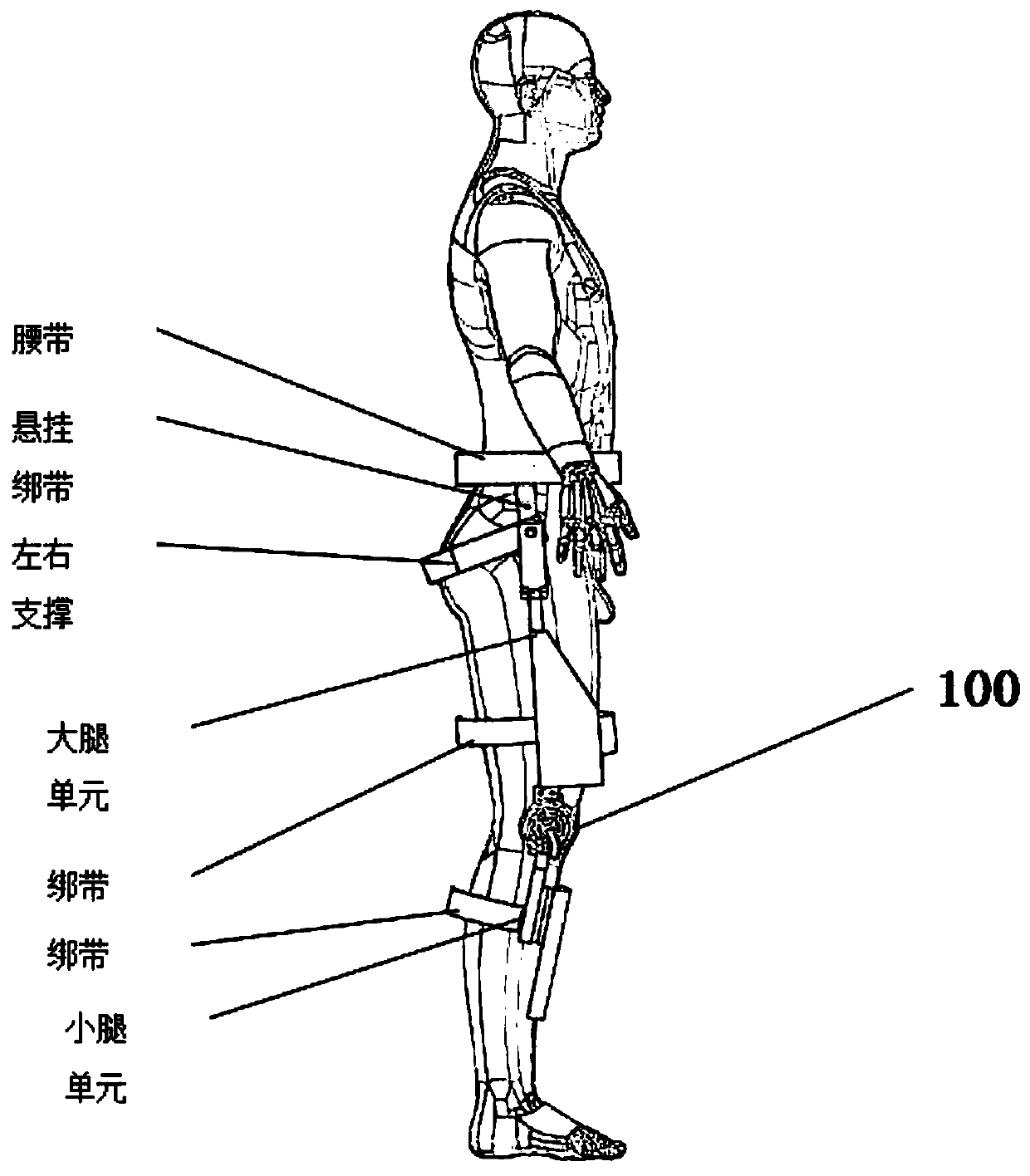
[0030] Such as Figure 1-Figure 3 As shown, the flexible clutchable exoskeleton joint actuator 100 of this embodiment is installed between the thigh and the lower leg of the orthosis exoskeleton parallel to the lower limbs of the human body, and is used to provide the joint in the inactive state Passive compliance and unilateral outlet structur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com