Method for quickly positioning feature information based on three-dimensional projection
A feature information, three-dimensional projection technology, applied in the field of precision measurement, can solve the problems of supplementary shooting, low efficiency, cumbersome process card production, etc., to achieve the effect of improving stability, improving implementation efficiency, and ensuring consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0028] The technical solution of the present invention is described in detail in conjunction with the drawings and specific embodiments.
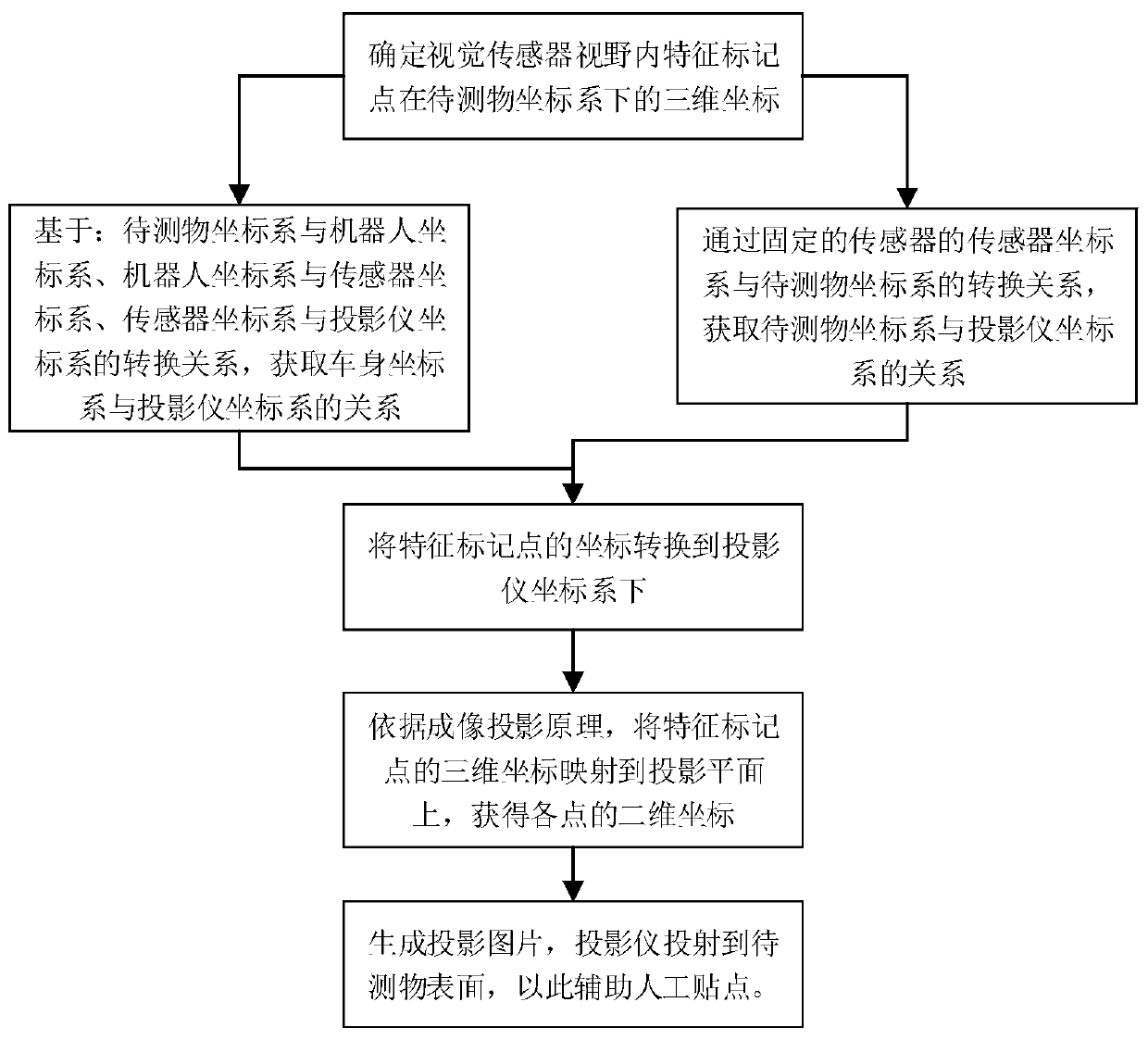
[0029] A method for fast positioning of feature information based on three-dimensional projection is realized by using a visual sensor provided with a camera and a projector, and the visual sensor is fixed at the end of the robot or at the station where the object to be measured is located; it includes the following steps:
[0030] 1) Based on the standard data, determine the three-dimensional coordinates of all the feature marker points corresponding to the robot in a certain pose or the visual sensor fixed in a certain position in the coordinate system of the object to be measured;
[0031] 2) Transform the coordinates of the feature marker points into the projector coordinate system through the conversion relationship between the object coordinate system and the robot coordinate system, the robot coordinate system and the sensor coordinat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com