A Center of Gravity Adjustment System Applied to Underwater Robots
An underwater robot, center of gravity adjustment technology, applied in the directions of underwater ships, underwater operation equipment, motor vehicles, etc., can solve the problems of complicated and cumbersome processes, unfavorable body control, etc., and achieve a simple overall structure, energy saving, and the number of motors. less effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
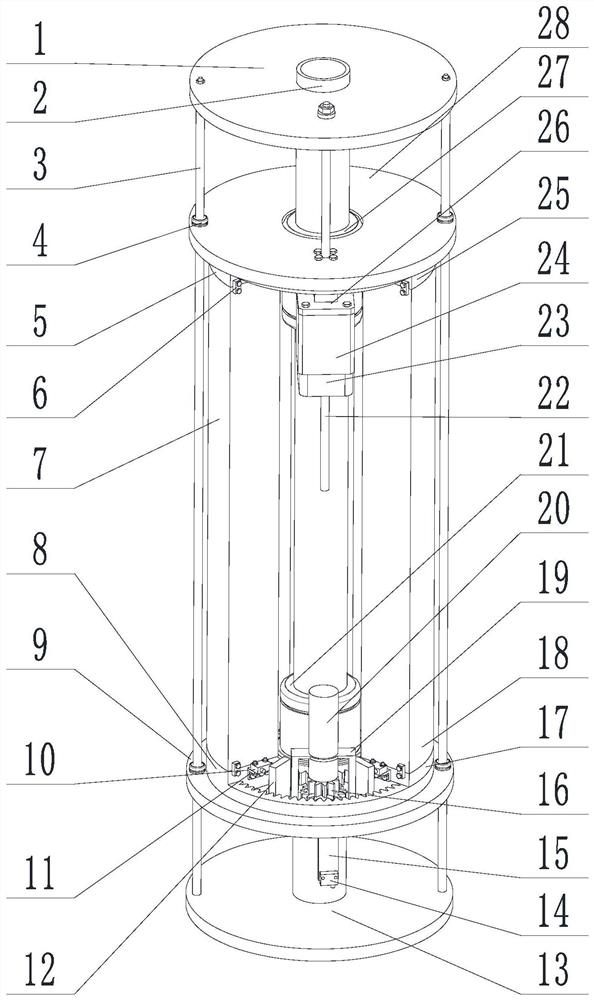
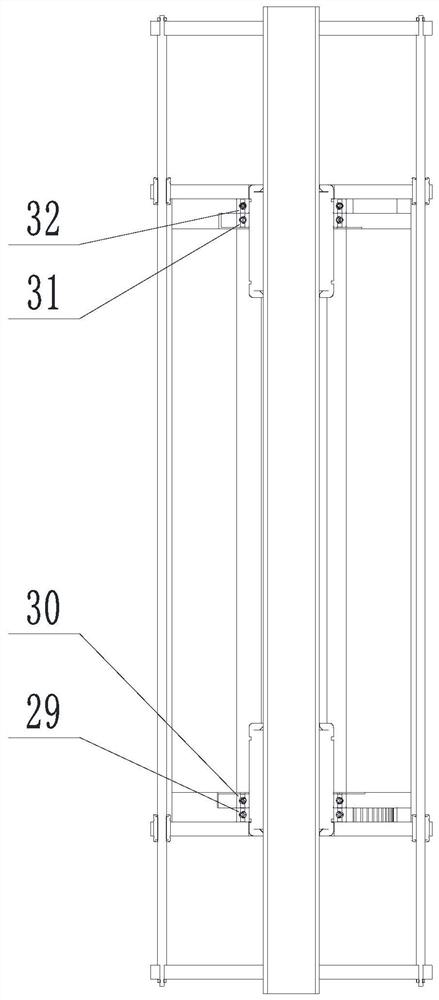
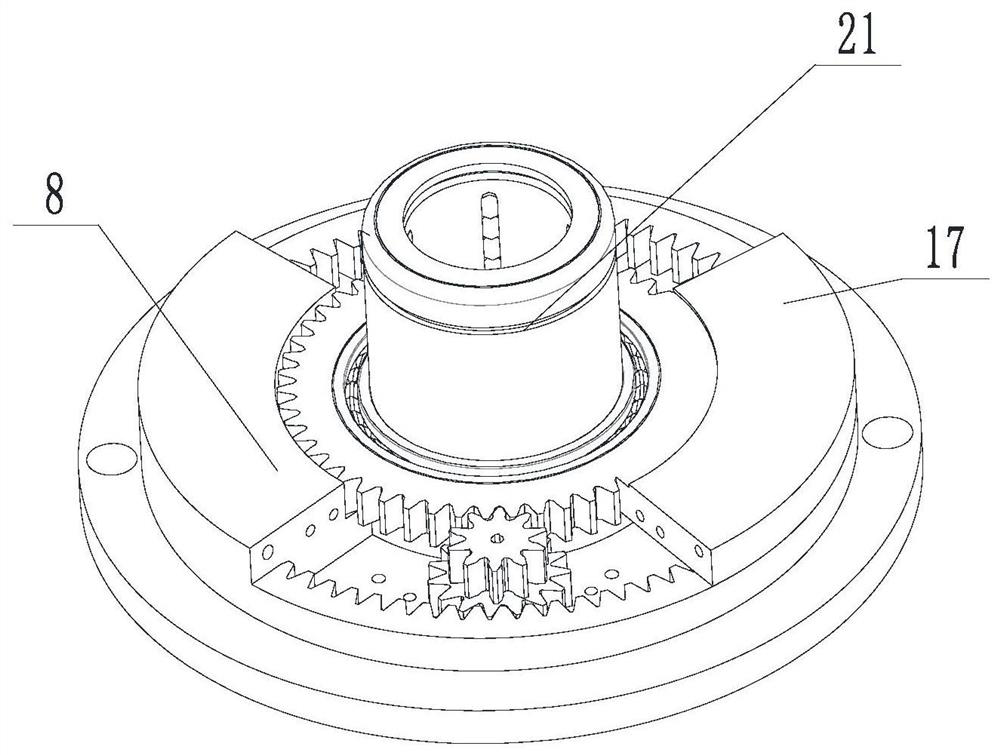
[0041] see Figure 1 to Figure 8 , the center of gravity adjustment system applied to the underwater robot in the present embodiment includes a support, the support is cylindrical, including a fixed upper chassis 1, a fixed lower chassis 13, an oil cylinder 2 and a guide rod 3, and the oil cylinder 2 doubles as a sliding column. The bracket is provided with a small linear bearing 4, a fourth turntable 5, a counterweight connection plate 6, a first counterweight 7, a first turntable 8, a lower movable plate 9, a circumferential limit switch 10, and a circumferential limit switch connection plate 11 , Circumferential limit switch block 12, axial limit switch 14, axial limit switch connecting plate 15, double-layer gear 16, second turntable 17, second counterweight 18, motor fixing frame 19, belt encoder Rotary reduction motor 20, the first large linear bearing 21, ball screw 22, motor encoder 23, linear motor 24, the third turntable 25, linear motor connecting frame 26, the seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com