Pedestrian pose resolving method for vehicle
A technology for pedestrians and vehicles, applied in the field of pedestrian pose calculation of vehicles, can solve the problems of lack of three-dimensional sense of space in detection results, limited perception range, low imaging quality, etc. Not high, high image quality effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
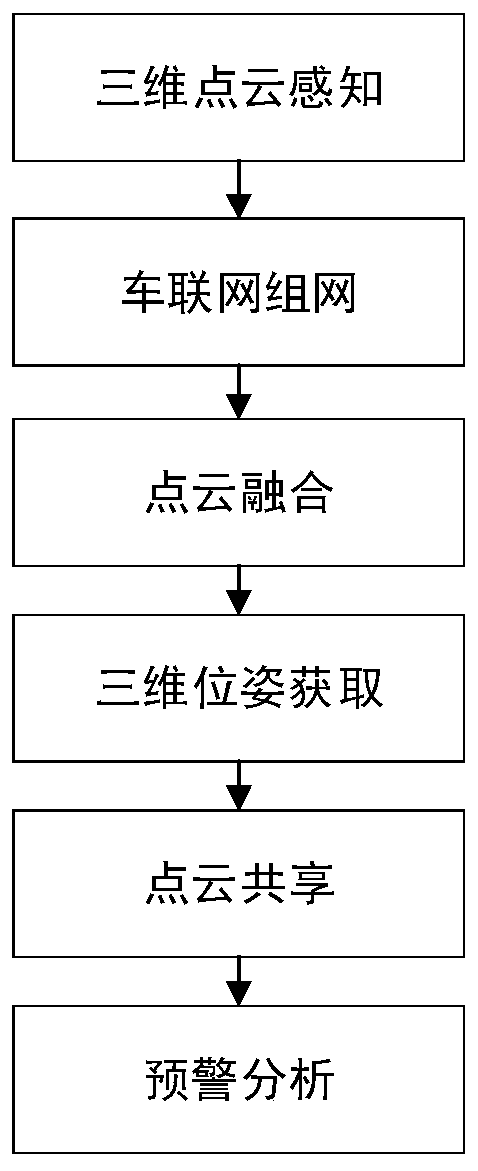
[0043] Pedestrian pose solving methods for vehicles include:
[0044] Step 1. Multiple vehicles with perception capabilities and networking capabilities use their surround-view cameras to sense pedestrians in the field of view in real time in a monocular form. According to the perception results, a 3D point cloud of pedestrians in the field of view of a single vehicle is obtained. That is, the step of 3D point cloud perception.
[0045] Step 2: According to the driving speed return value of the on-board system, invalid vehicles are filtered, and vehicles in a stationary state are networked to form a local vehicle network that can share valid data. That is, the networking steps of the Internet of Vehicles.
[0046] Step 3: Based on the local Internet of Vehicles, the point cloud matching method is used to synthesize and stitch the 3D point clouds of pedestrians in the multi-vehicle field of view to obtain the global 3D point cloud. That is, the point cloud fusion step.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com