Hybrid vehicle control method and system for low adhesion road surface
A vehicle control system and vehicle control technology, which are applied in the field of hybrid vehicle control methods and systems on low-adhesion roads, can solve problems such as discontinuous sudden changes in wheel torque, vehicle jolting, and rear wheel skidding, so as to reduce the probability of slipping, The effect of prolonging the service life and reducing the torque at the front wheel end
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] It should be noted that, in the case of no conflict, the embodiments and features in the embodiments of the present invention can be combined with each other.
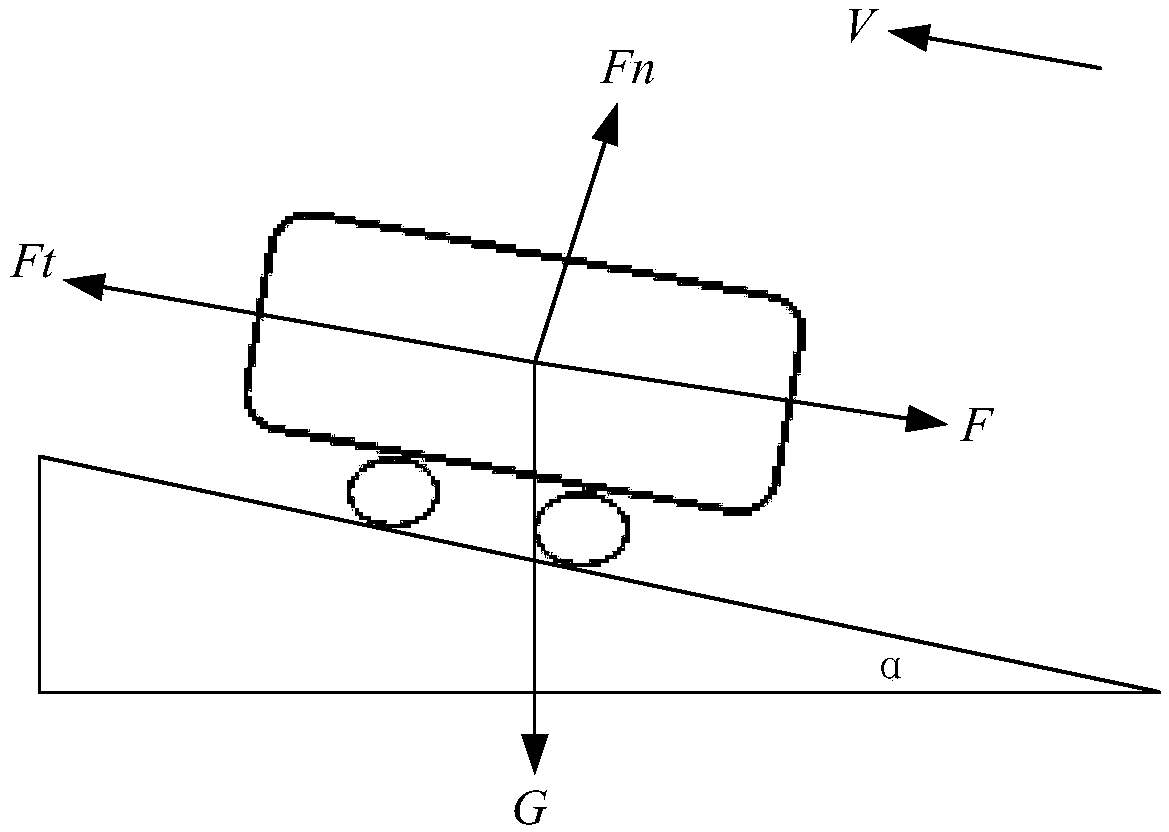
[0056] In addition, the methods and systems mentioned in the embodiments of the present invention need to be understood in conjunction with the driving dynamics equation of the vehicle, and the driving dynamics equation of the whole vehicle will be described here first.
[0057] figure 1 It is a conventional vehicle force diagram, where V represents the speed of the vehicle and shows the driving direction of the vehicle, Fn is the support force provided by the ramp, F is the total resistance, and the meaning of other technical parameters can be referred to below. When the vehicle is running on a certain slope, in addition to overcoming the rolling resistance F from the ground f and the air resistance F from the air w In addition, it is necessary to overcome the slope resistance F i , when the vehicle accelera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com