Multi-vehicle obstacle avoidance path planning method
A path planning and multi-vehicle technology, applied in the field of transportation, to achieve the effect of improving the scope of application scenarios, avoiding planning confusion, and high authority
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0058] Such as Figures 1 to 3 As shown, this embodiment provides a multi-vehicle obstacle avoidance path planning method, which solves the problem of how to dynamically adjust the paths of multiple vehicles during actual driving to achieve safe driving.
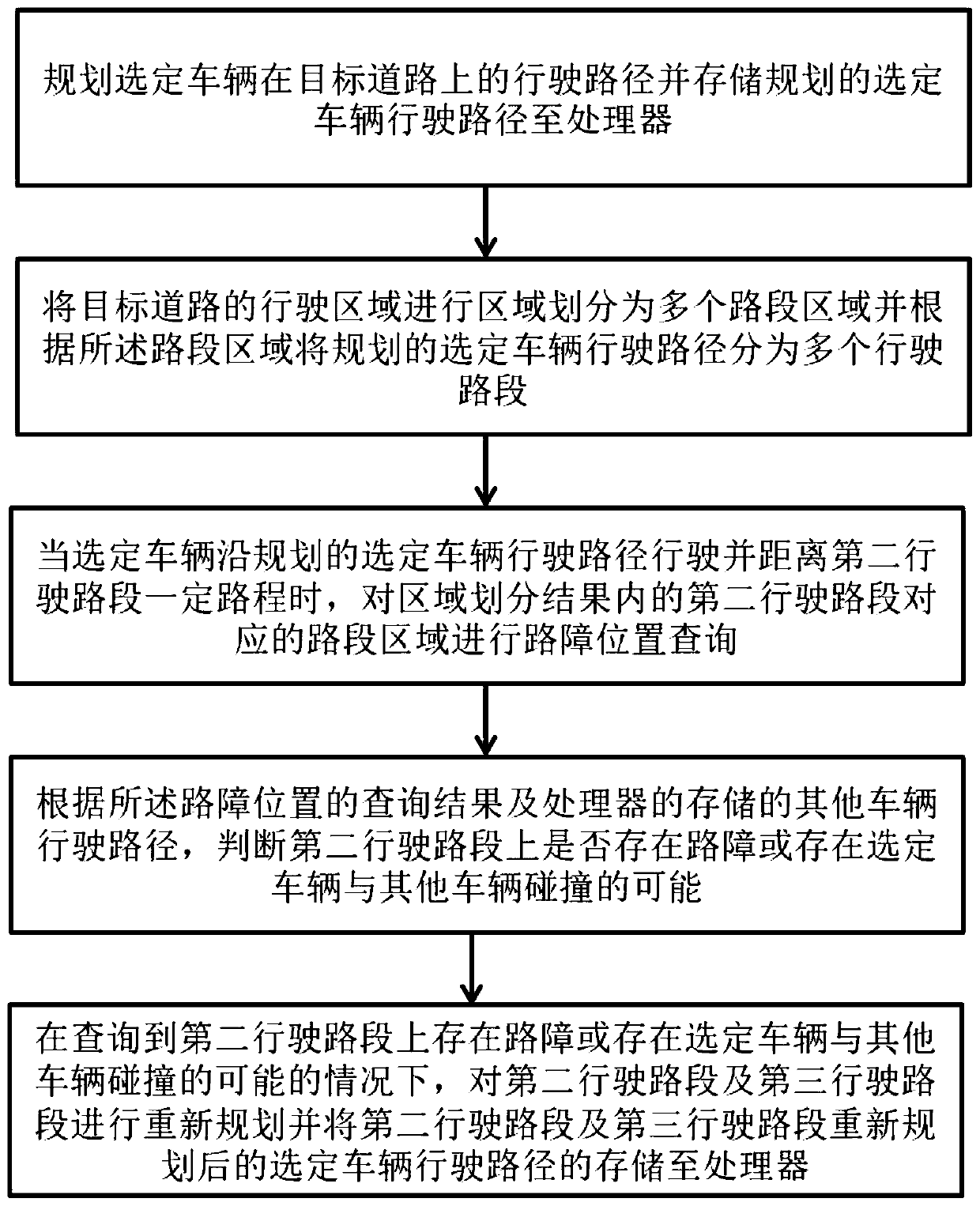
[0059] A multi-vehicle obstacle avoidance path planning method, characterized in that the method comprises:
[0060] Planning the travel path of the selected vehicle on the target road and storing the planned travel path of the selected vehicle;
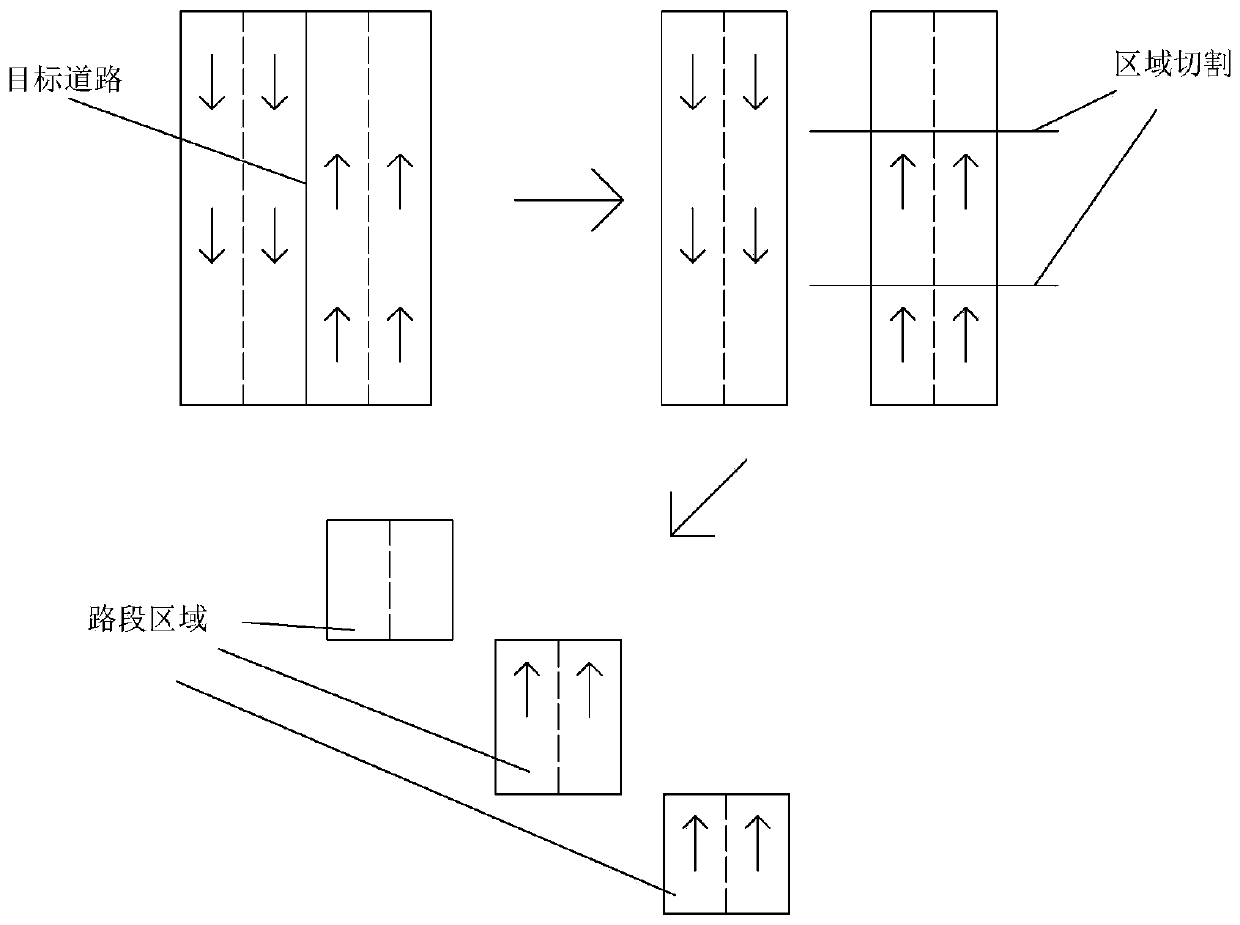
[0061] Dividing the driving area of the target road into multiple road section areas and dividing the planned selected vehicle driving path into multiple driving road sections according to the road section areas;
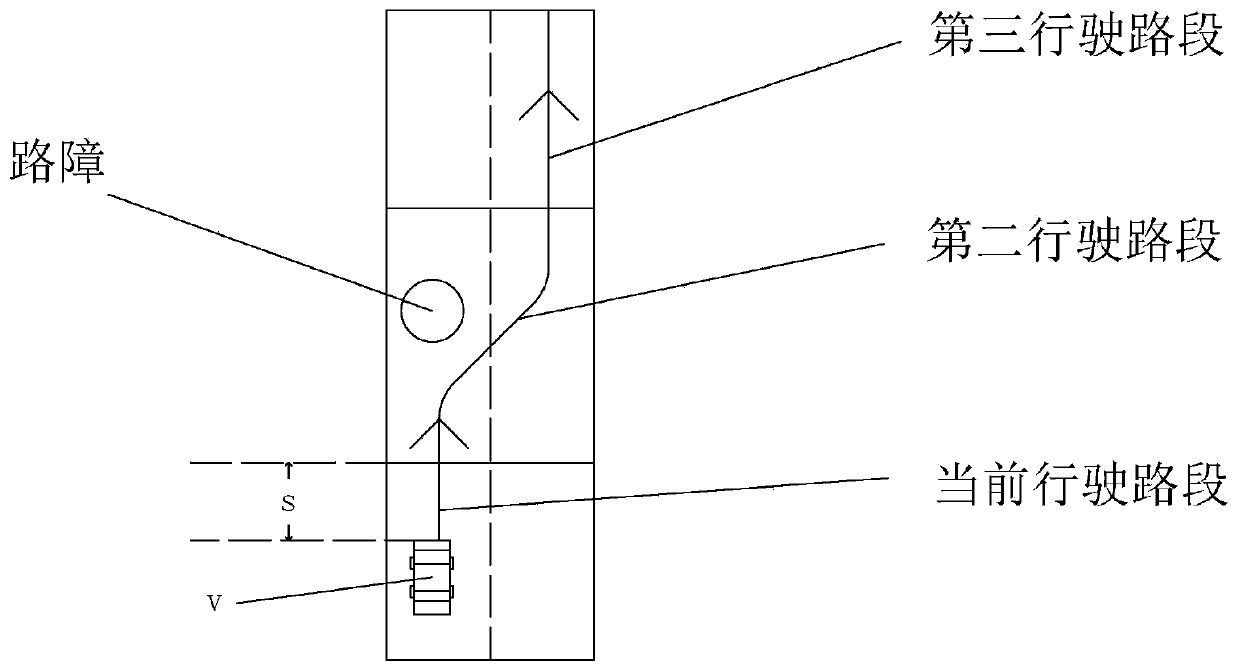
[0062] When the selected vehicle travels along the planned selected vehicle travel route and is a certain distance away from the second travel segment, perform a roadblock location query on the segment area corresponding to the second travel segment in the area divisi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com