Tracking focusing method and device, equipment and medium
A technology of image acquisition equipment and focal length, which is applied in the field of tracking and focusing, and can solve problems such as untimely focusing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
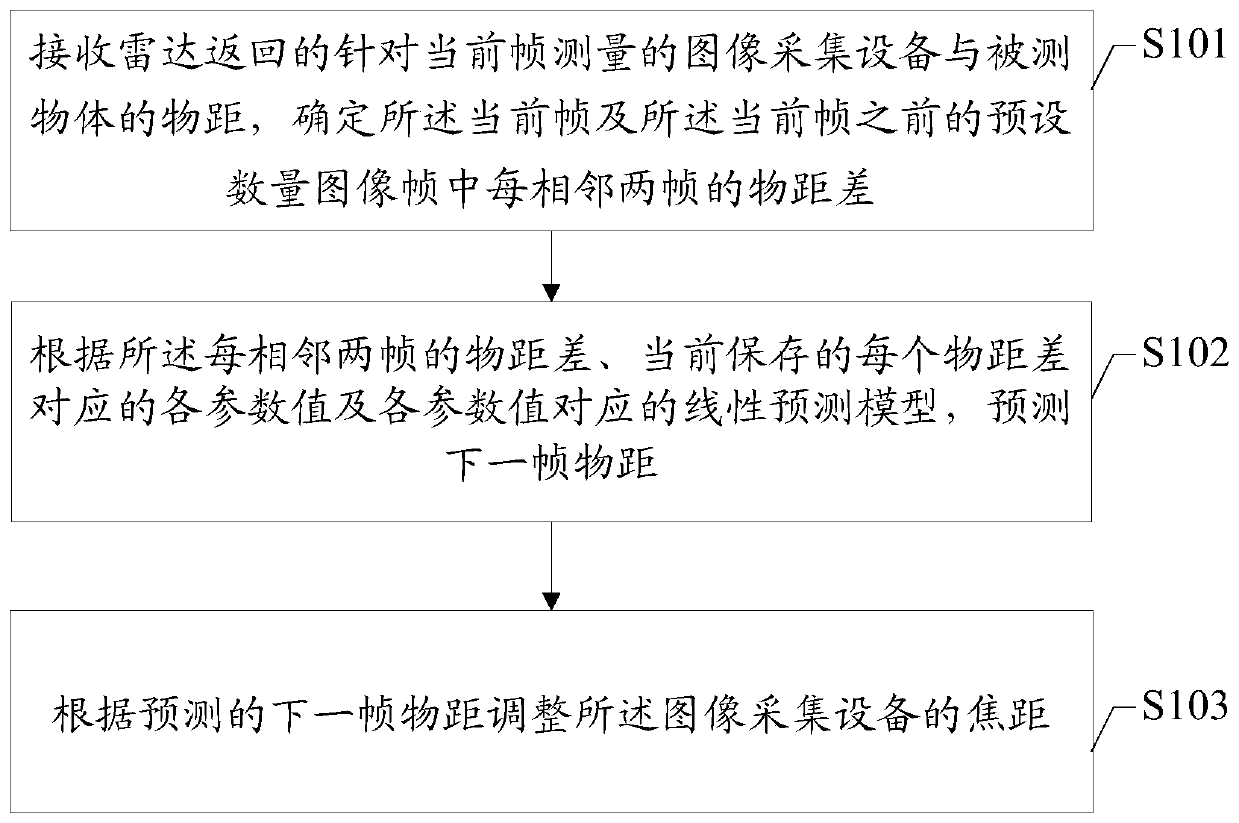
[0047] figure 1 It is a schematic diagram of a focus tracking process provided by an embodiment of the present invention, and the process includes the following steps:
[0048] S101: Receive the object distance between the image acquisition device and the measured object measured for the current frame returned by the radar, and determine the object distance difference between the current frame and the preset number of image frames before the current frame for every two adjacent frames.
[0049] The tracking and focusing method provided by the embodiment of the present invention is applied to an image acquisition device. The image acquisition device is equipped with a radar. Specifically, the image acquisition device can be an all-in-one machine with a long-focus movement equipped with a radar or an on-board camera with a radar. The dome camera equipment with a long focal length movement is not specifically limited in this embodiment of the present invention.
[0050]When the ...
Embodiment 2
[0067] In order to realize object distance prediction, on the basis of the above-mentioned embodiments, in the embodiment of the present invention, according to the object distance difference between every two adjacent frames, each parameter value corresponding to each currently saved object distance difference and The linear prediction model corresponding to each parameter value, predicting the object distance of the next frame includes:
[0068] Determine the object distance between the next frame and the current frame according to the object distance difference between each adjacent two frames, each parameter value corresponding to each object distance difference currently stored, and the linear prediction model corresponding to each parameter value Difference;
[0069] The object distance of the next frame is determined according to the object distance of the current frame and the object distance difference between the next frame and the current frame.
[0070] Wherein, t...
Embodiment 3
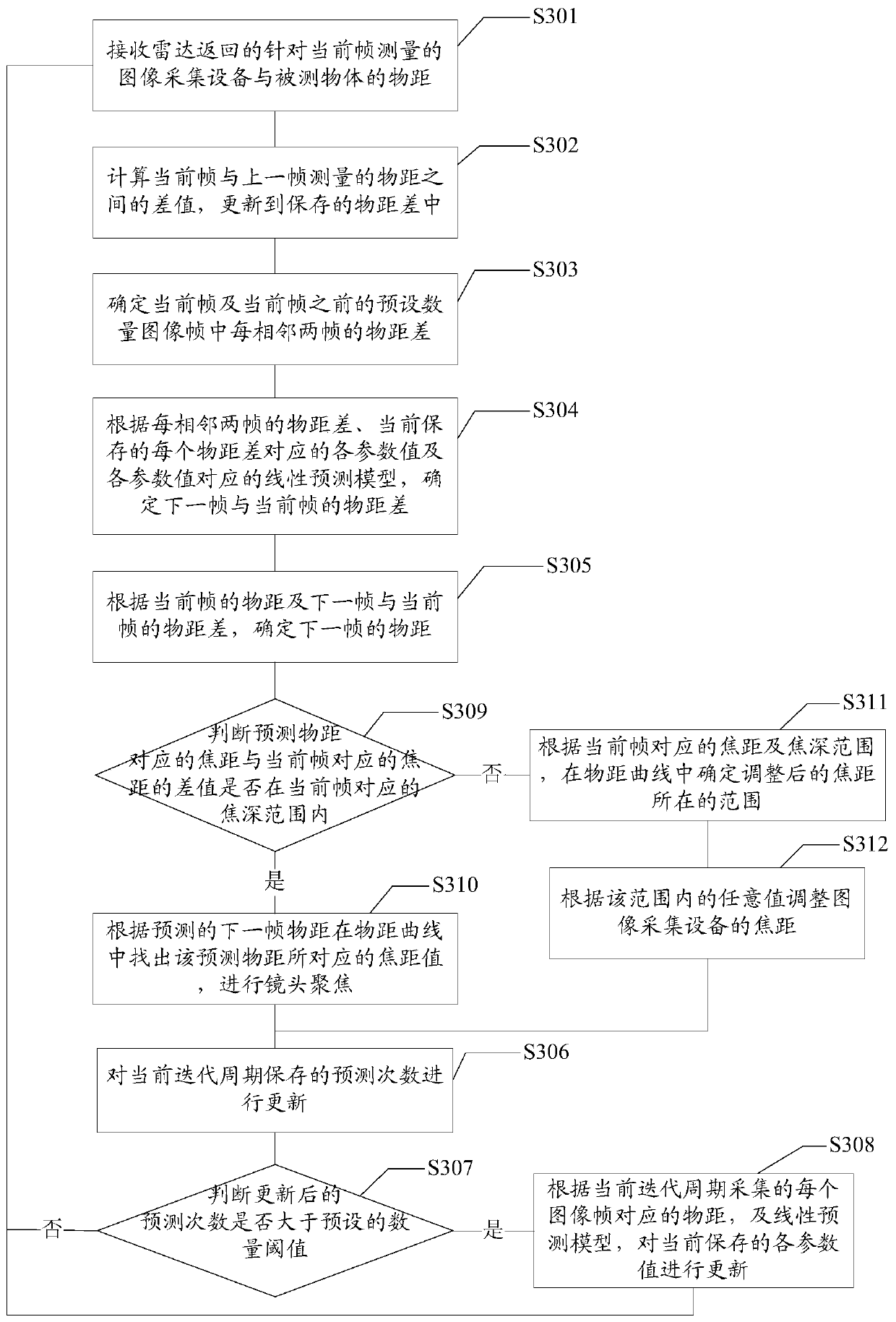
[0083] According to the description of the above embodiment, it can be seen that in the embodiment of the present invention, the linear prediction model is used to predict the object distance, and the parameter value of each parameter in the currently saved linear prediction model may be a preset initial value, or may be an updated value. In order to predict the object distance more accurately, in the embodiment of the present invention, the parameter values of each parameter in the linear prediction model may be updated periodically. On the basis of the above embodiments, in the embodiment of the present invention, after the object distance of the next frame is predicted, the method further includes:
[0084] Update the number of predictions saved in the current iteration cycle;
[0085] Judging whether the updated number of predictions is greater than a preset number threshold;
[0086]If so, update the currently saved parameter values according to the object distance c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com