Multifunctional humanoid multi-legged robot
A multi-legged robot and multi-functional technology, which is applied in the field of bionic robots, can solve the problems of humanoid robots or multi-legged robots that have not yet discovered multi-functional humanoid multi-legged robots, and achieve considerable development prospects and benefits, good viewing, Effects of improving adaptability and climbing and running ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
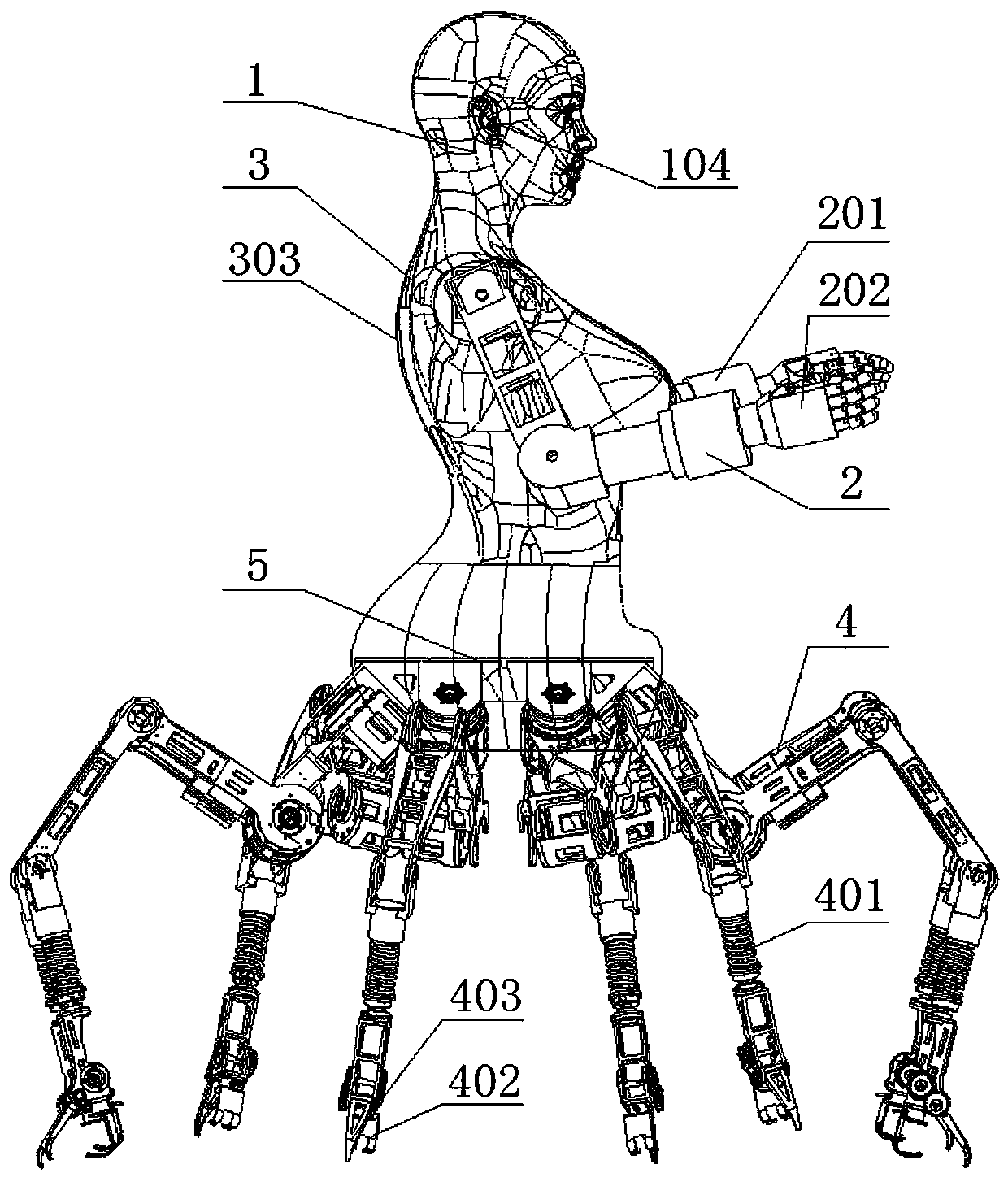
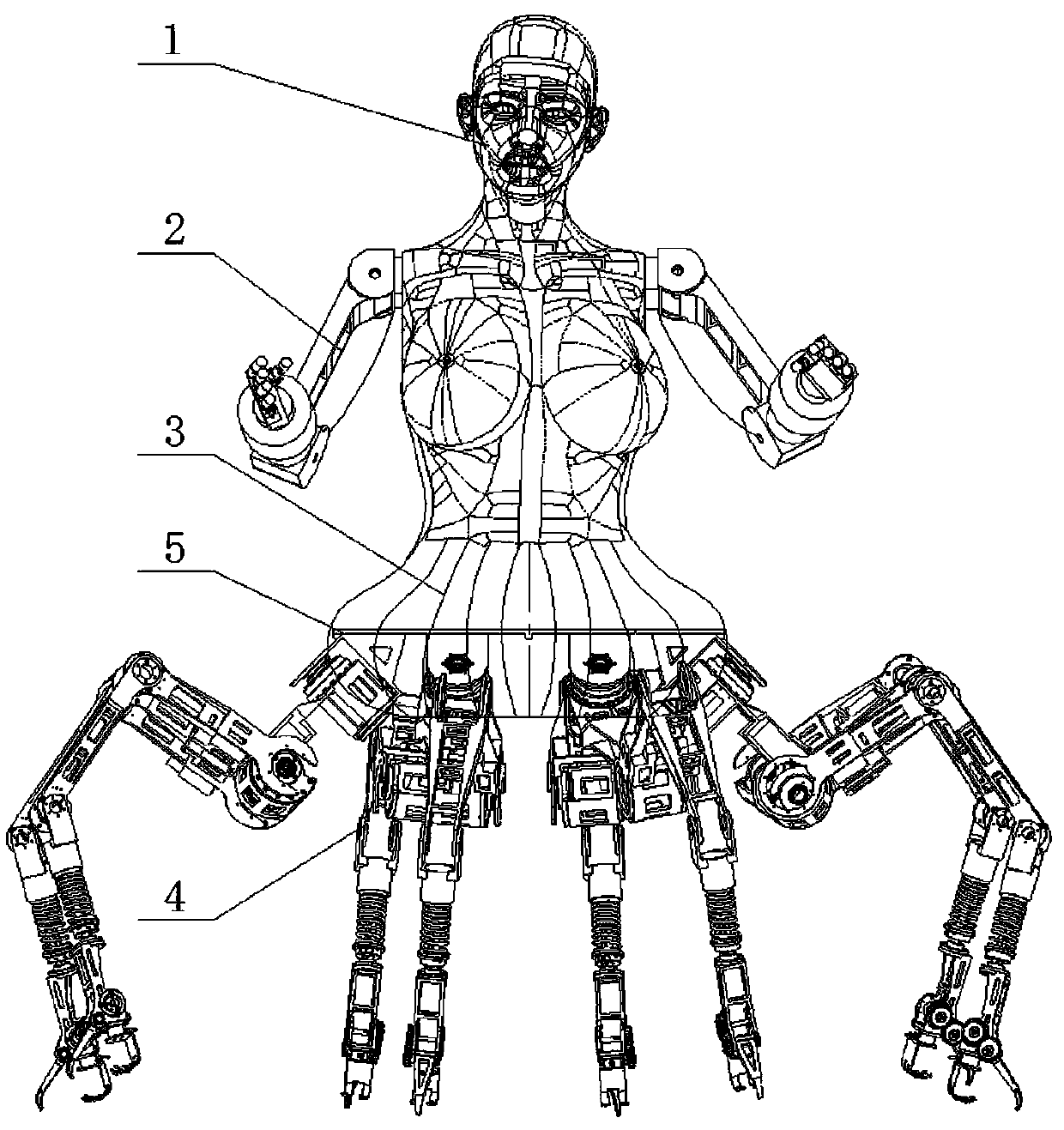
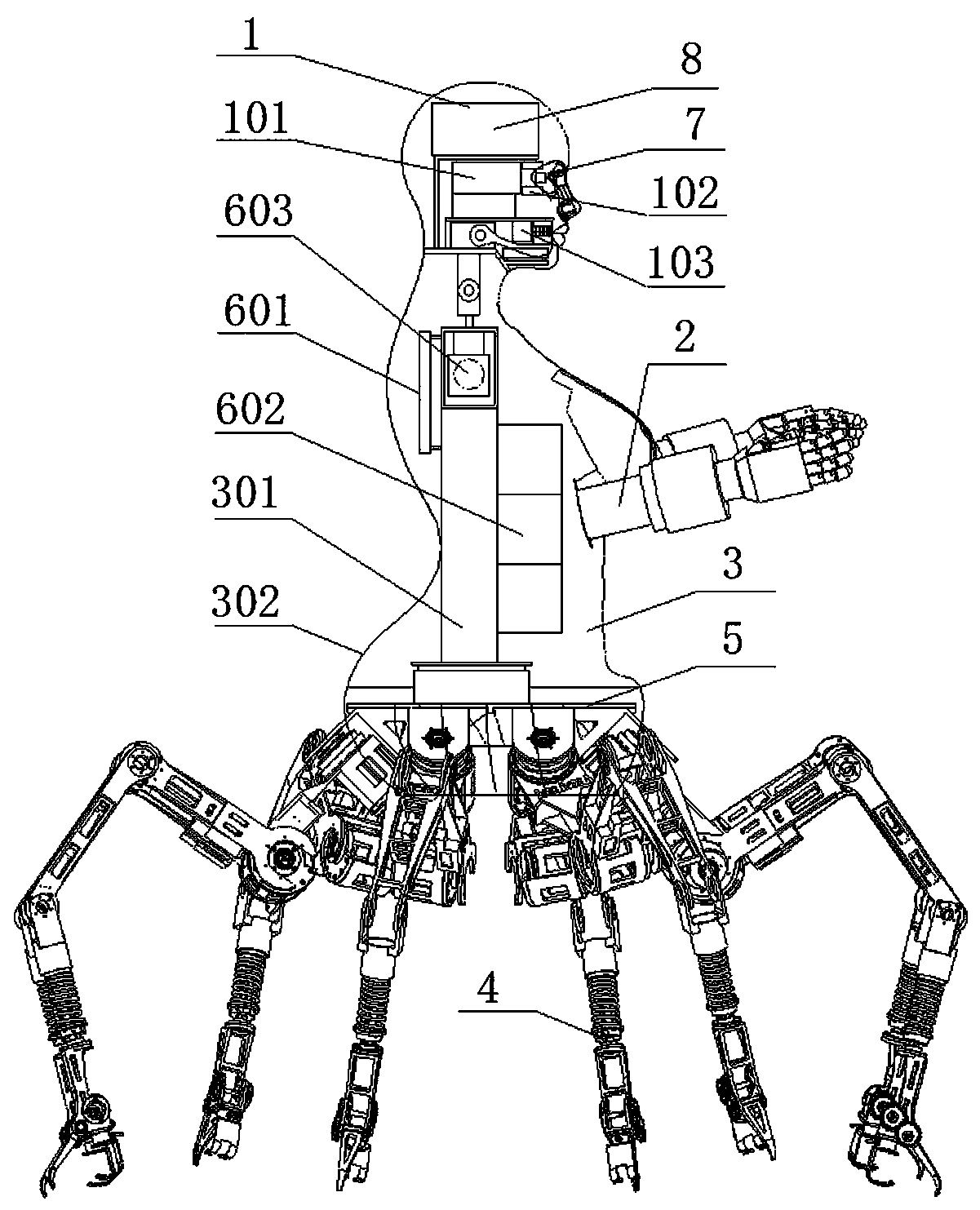
[0034] refer to Figure 1 to Figure 4 , this implementation includes a humanoid mechanical head and neck 1, a humanoid mechanical arm 2, a humanoid mechanical torso 3 and a bionic mechanical leg 4. The bionic mechanical leg 4 is a bionic mechanical leg 4 with five degrees of freedom, and the number of bionic mechanical legs 4 is eight. The bionic mechanical legs 4 are connected to the humanoid mechanical torso 3 after forming a multi-legged robot platform 5 through connectors.
[0035] The bionic mechanical leg 4 is a five-joint footed mechanical leg;
[0036] The multi-leg robot platform 5 is fixed on the hip of the humanoid mechanical torso 3 .
[0037] The humanoid mechanical torso 3 is composed of a column 301 supplemented by a skeleton 302 and an artificial silicone skin 303 on the surface of the skeleton 302. The humanoid robotic arm 2 adopts a humanoid robotic arm 201 with four degrees of freedom and a dexterous hand 202 with nine degrees of freedom.
[0038] In this ...
Embodiment 2
[0043] refer to Figure 5 The main difference between this embodiment and Embodiment 1 is that this embodiment adopts four bionic mechanical legs 4 with five degrees of freedom, and the bionic mechanical legs 4 are connected with the bottom of the humanoid mechanical torso 3 to form a humanoid quadruped robot; The bionic mechanical leg 4 is provided with a self-powered control mechanism 404 and a power supply mechanism 405, and the control mechanism 404 is controlled by the control device 601; 3 connection; the humanoid robot torso 3 described in this embodiment adopts a flexible humanoid mechanical torso with a flexible waist, which can realize bowing or bending of the human body.
Embodiment 3
[0045] refer to Figure 6 and Figure 7 The main difference between this embodiment and Embodiment 1 is that this embodiment adopts six five-degree-of-freedom bionic mechanical legs 4, and the bionic mechanical legs 4 are connected with the waist periphery of the humanoid mechanical torso 3, and this embodiment does not have multiple legs. The robot platform is directly connected with the bionic mechanical legs 4 and the waist of the humanoid mechanical torso 3 to form a humanoid multi-legged robot.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com