UAV selective obstacle avoidance system and method based on binocular vision and three-axis pan/tilt
A binocular vision, machine-selective technology, applied in control/regulation systems, three-dimensional position/channel control, non-electric variable control, etc., can solve the problem that ultrasonic waves cannot accurately locate obstacles, have a large impact, and require a large amount of calculation. problem, to achieve the effect that is conducive to autonomous obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] In order to make the purpose, technical solution and advantages of the present invention clearer, the following in conjunction with the attached Figure 1-8 , to further describe the present invention in detail.
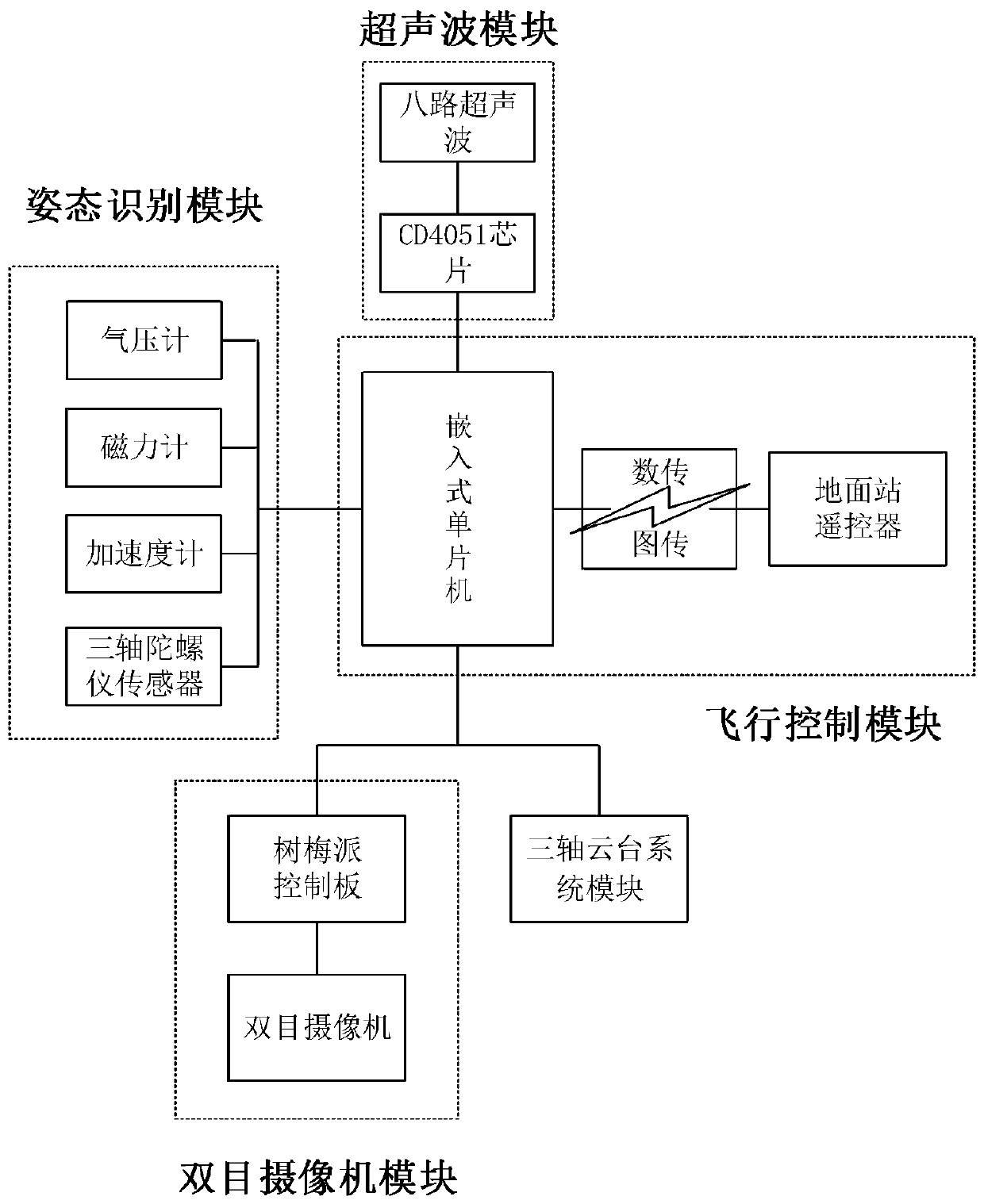
[0077] refer to figure 1 , UAV selective obstacle avoidance system and control method based on binocular vision and three-axis gimbal, characterized in that the obstacle avoidance system includes a multi-channel ultrasonic module, a raspberry pie control board, a binocular ranging module, Three-axis gimbal system module, UAV attitude recognition module, flight control module and transmission module.
[0078] The multi-channel ultrasonic module includes eight ultrasonic waves and a CD4051 chip around the drone, which are used to detect whether there are obstacles in the surrounding environment, measure the distance to obstacles, simply judge whether to avoid obstacles and use binocular cameras; ultrasonic measurement Range: horizontal viewing angle 60°, verti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com