Novel wheel foot robot capable of moving in all-around mode
An omnidirectional mobile and robotic technology, applied in the field of wheel-footed robots, can solve the problems of large number of joint brakes, complex leg structure, and high cost, and achieve the effect of simple structure, no drive unit, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
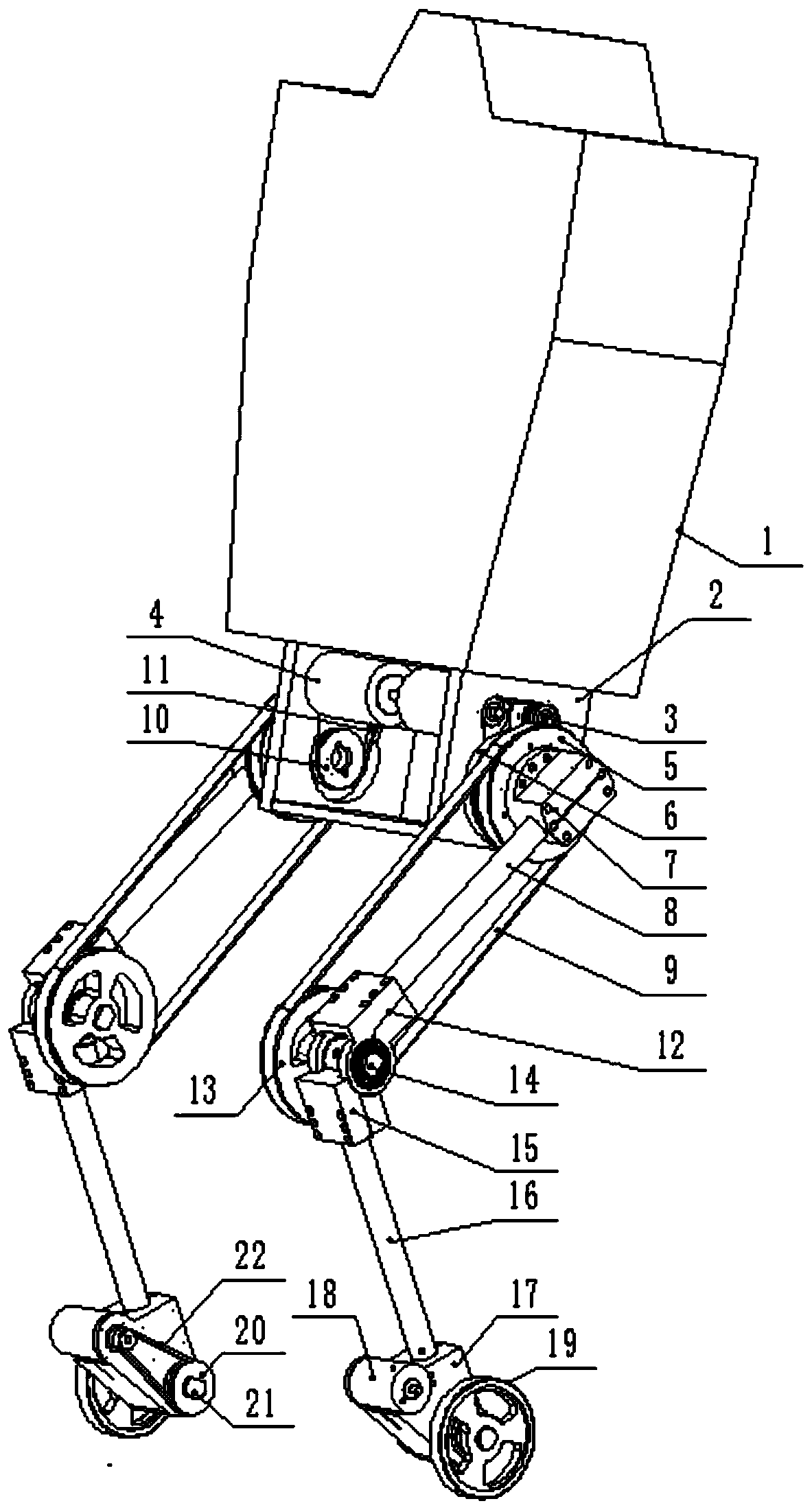
[0020] Such as figure 1 As shown, a new wheel-footed robot that can move in all directions includes a body 1. The bottom of the body 1 is connected with a hip joint assembly. The left and right sides of the hip joint assembly are respectively connected with a left thigh assembly and a right thigh assembly. The thigh assembly is hinged with a left lower leg assembly through the left knee joint assembly, and the right thigh assembly is hinged with a right lower leg assembly through the right knee joint assembly.
[0021] In this embodiment, the hip joint assembly includes a U-shaped motor mount 2, a first motor 3, a second motor 4, a harmonic reducer 6, and a hip joint synchronous input pulley 5, and the motor mount 2 is fixedly connected to the body 1. The bottom of the bottom, the first motor 3 and the second motor 4 are installed in the motor holder 2, the side walls of the left and right sides of the motor holder 2 are provided with through output ports, the output port of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com