Nonlinear active suspension fault-tolerant tracking control method based on proportional integral observer
A technology of active suspension and proportional integral, which is applied in the direction of elastic suspension, suspension, transportation and packaging, etc., and can solve problems such as difficult control effects of the suspension system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0112] The present invention will be further explained below in conjunction with the drawings.
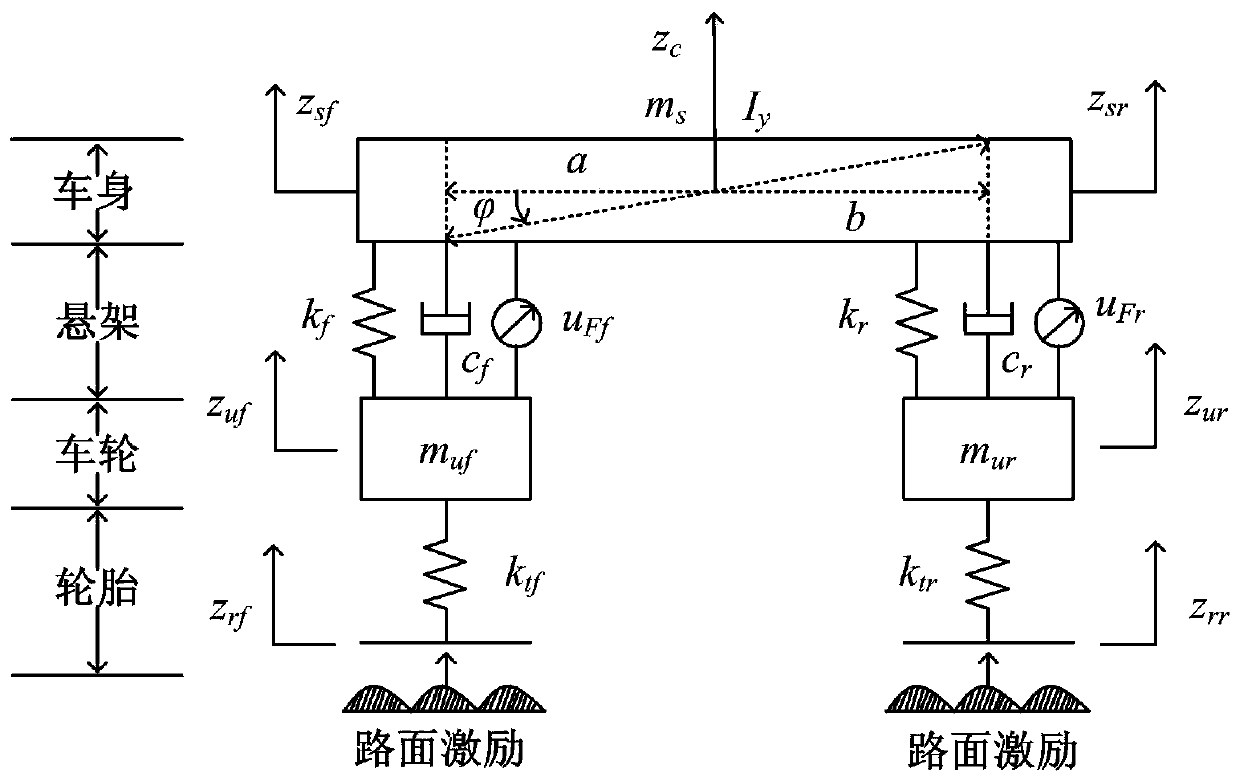
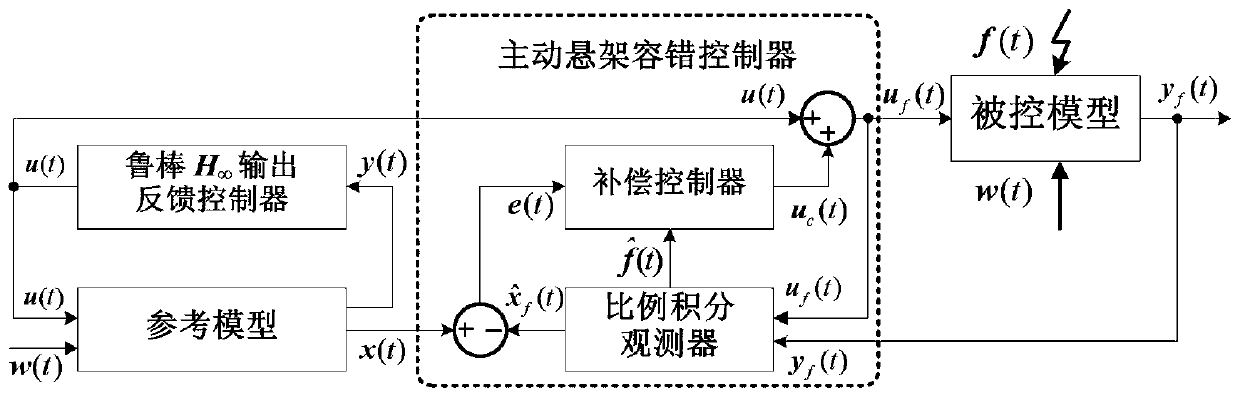
[0113] Such as figure 1 , As shown in 2, considering the nonlinearity and actuator failure of the active suspension of the vehicle, combined with the T-S fuzzy model method, H ∞ Output feedback control and proportional integral observer, a fault-tolerant tracking control method is proposed, so that the vehicle can still maintain good performance after the suspension fails.
[0114] figure 1 It is a four-degree-of-freedom 1 / 2 vehicle suspension system model. It contains the main characteristics of vehicle dynamics analysis and has a simple structure, so it is widely used in the study of suspension control strategies. In addition, figure 2 Describes the structural framework of the fault-tolerant tracking control strategy based on the proportional integral observer designed for the active suspension system of the present invention in the presence of actuator failure and external road dis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com