Unmanned aerial vehicle cooperative reconnaissance path planning method based on energy consumption fairness
A technology for path planning and drones, which is applied in the directions of instruments, data processing applications, and predictions. Maximum energy consumption to ensure the effect of smooth completion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
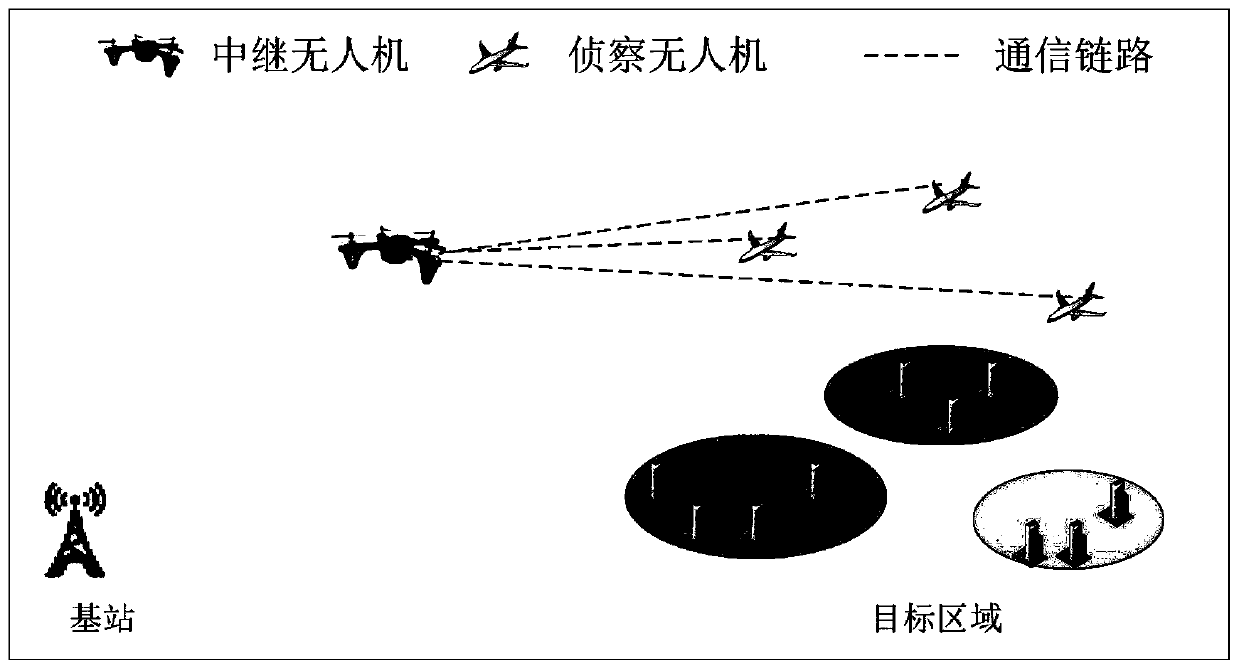
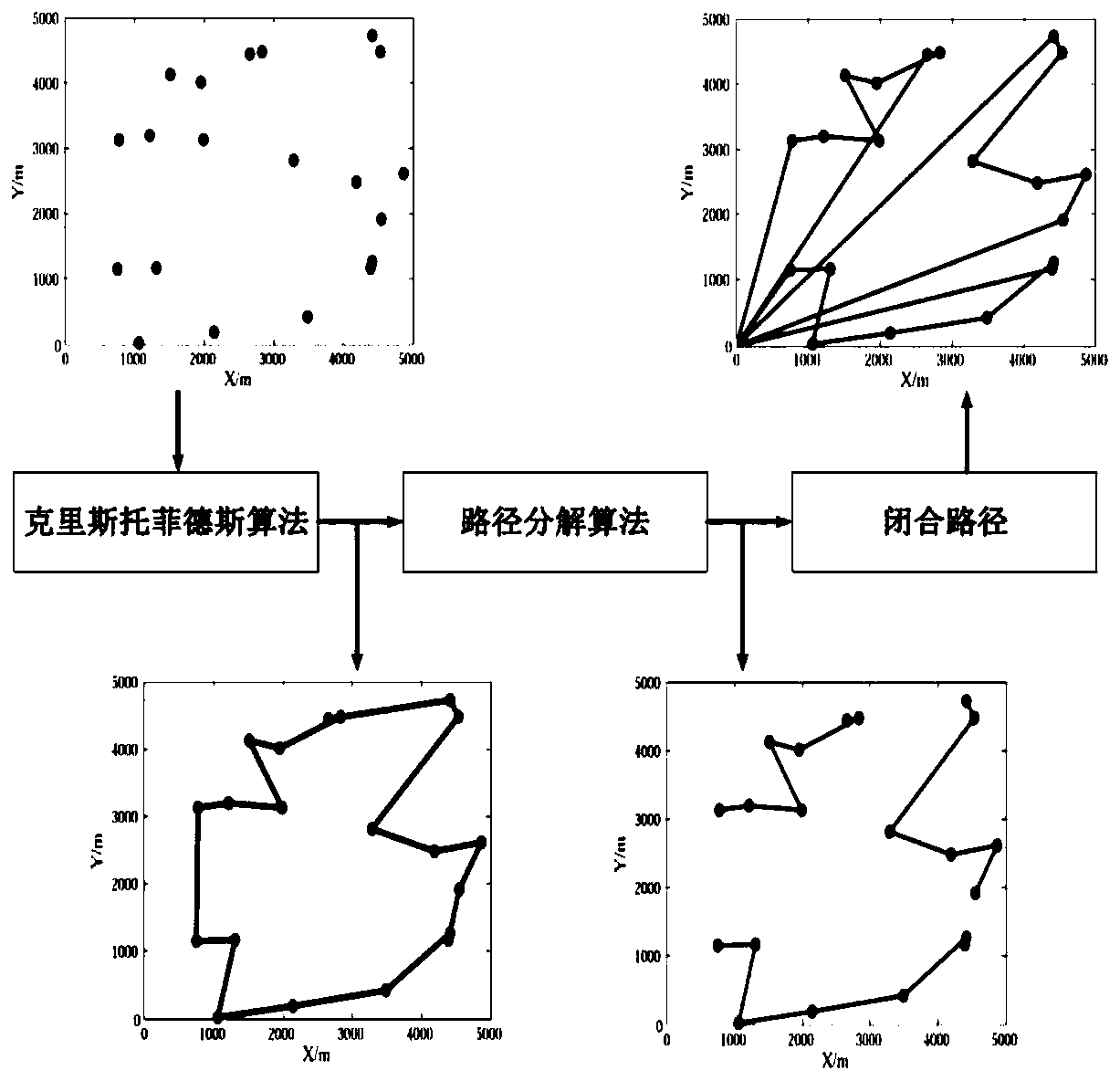
[0085] Such as figure 2 , 3 As shown, a UAV cooperative reconnaissance path planning method based on energy fairness is applied to specific examples to ensure energy fairness among multiple UAVs. The specific application is as follows:
[0086]Consider using multiple drones to conduct reconnaissance on N target points in an area of 5km×5km. All drones start flying from the initial position (0,0,50). The minimum distance between UAVs for collision avoidance is 100m. The motion energy consumption Q of the UAV is 13.19J / m, and the hovering power P hv is 237J / s, communication energy parameter e tx It is 10pJ / (m·bit). In this embodiment, three different path planning methods are compared, which are: 1) Each UAV is responsible for the same number of target points for reconnaissance. First calculate a path covering all target points, and then decompose the path according to the principle that the number of tasks is equal; 2) Use the algorithm of the multi-traveling salesman ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com