A multi-stage fusion braking control system and method for a straddle carrier
A technology of braking control and straddle carrier, which is applied in the direction of electric braking system, brake, braking action starting device, etc., which can solve the problems of slow braking response speed, large braking torque, and inability to provide sufficient braking torque, etc. problem, to achieve the effect of guaranteeing braking performance and satisfying response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
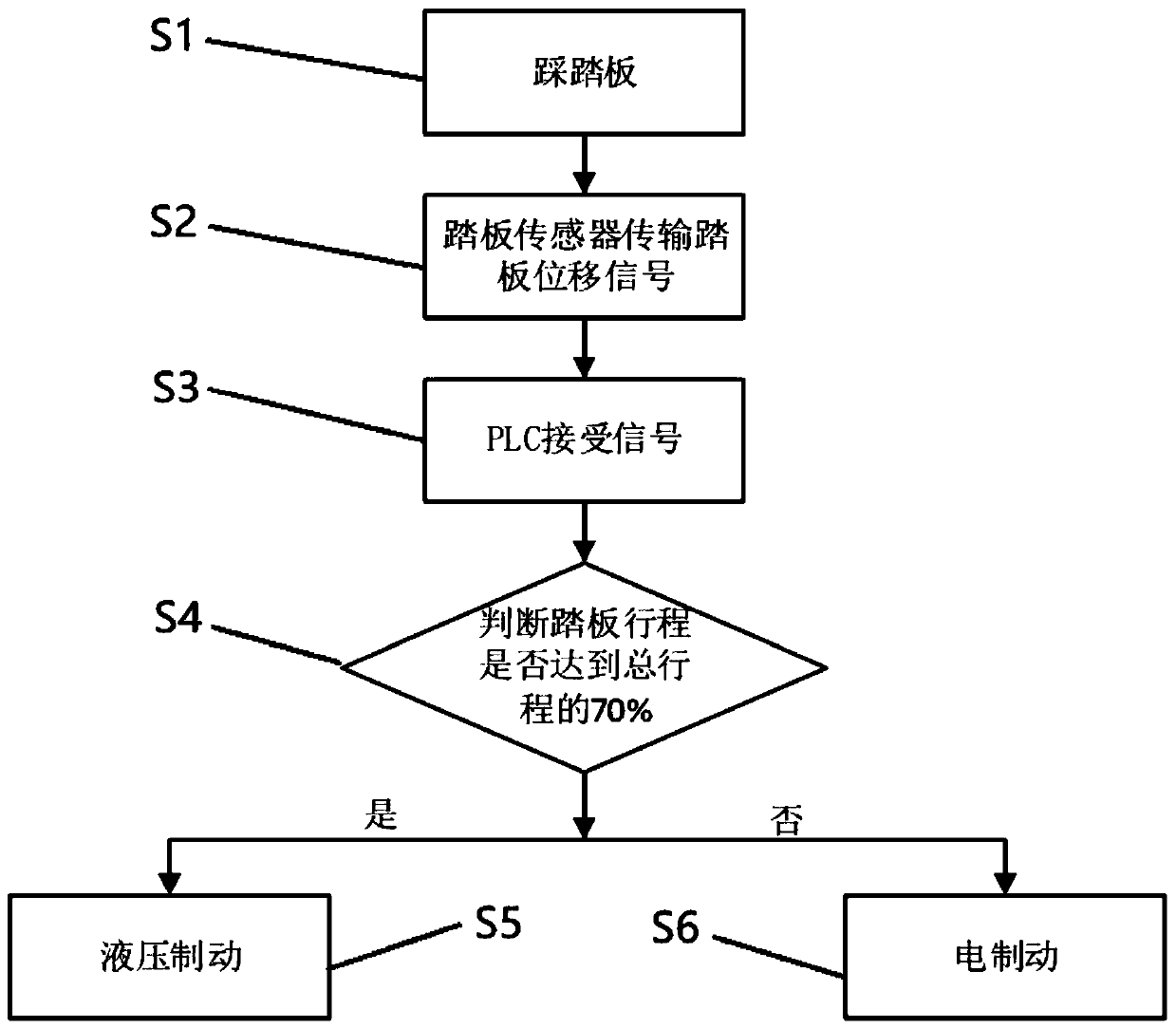
[0025] In view of the existing technology, in order to meet the requirements of the straddle carrier on the braking performance (according to the requirements, when the full load is 60+50T=110T, the speed is 24km / h, and the braking distance is 16m; when the no-load is 60T, the speed is 24km / h h, the braking distance is 10m), the present invention firstly discloses a multi-level fusion braking control system for a straddle carrier, its main system modules include: electric braking system, hydraulic braking system, (brake) pedal sensor, control modules etc.
[0026] The straddle carrier of the present invention has two independent braking systems of electric braking and hydraulic braking, and the multi-stage fusion braking of the present invention is mainly composed of electric braking and hydraulic braking, hydraulic braking an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com