Mobile robot positioning method based on occupancy grid map and combined with imu
A mobile robot that occupies a grid. It is applied in the direction of instruments, measuring devices, surveying and navigation, etc. It can solve the problems of increased technical cost, poor positioning effect, and insufficient positioning effect, and achieves high precision and good robustness. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The accompanying drawings are only used for exemplary description and cannot be understood as a limitation of the present invention; in order to better illustrate this embodiment, some parts of the accompanying drawings may be omitted, enlarged or reduced, and do not represent the size of the actual product; for those skilled in the art For personnel, it is understandable that some well-known structures in the drawings and their descriptions may be omitted. The positional relationship described in the drawings is only for illustrative purposes, and cannot be understood as a limitation of the present invention.
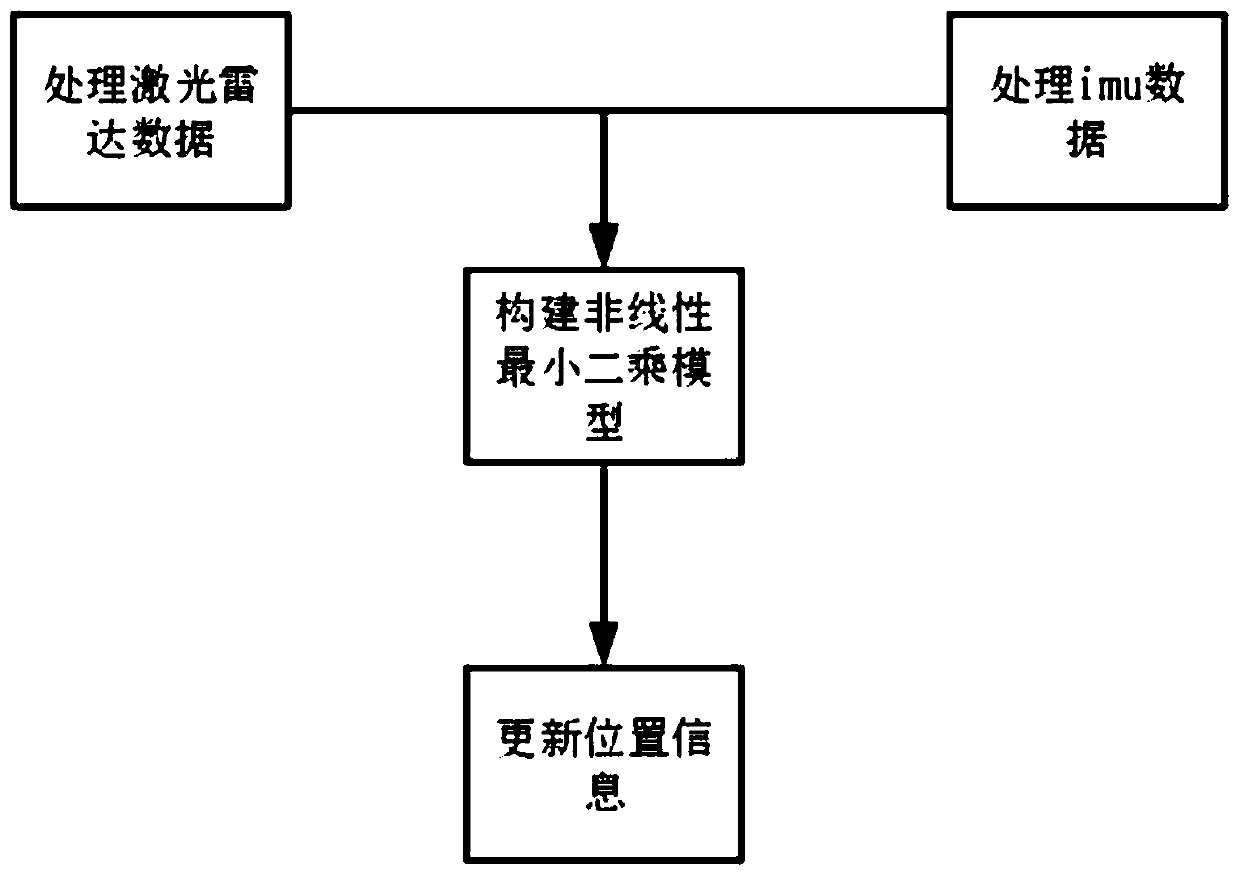
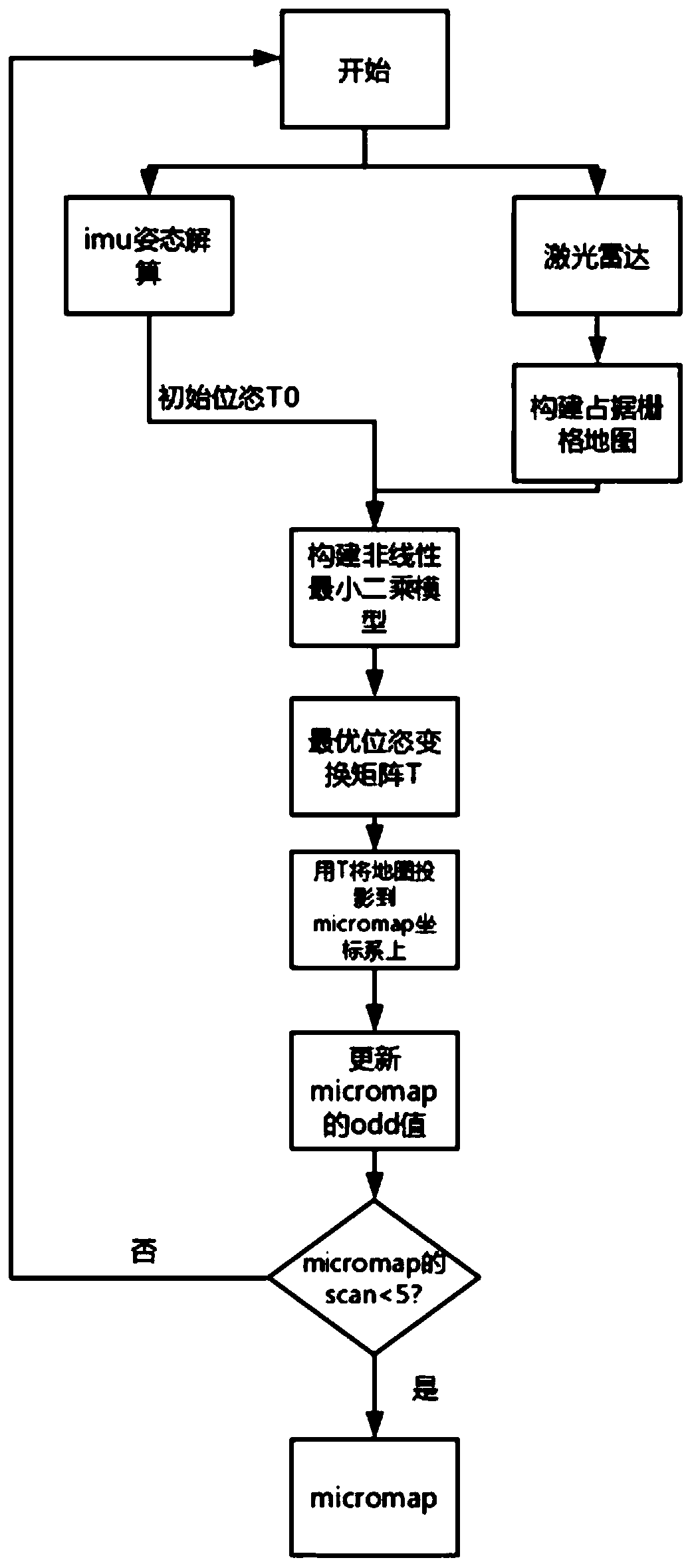
[0041] Such as Figure 1 to 4 As shown, a mobile robot positioning method based on an occupancy grid map combined with imu includes four parts: pose estimation, feature extraction, data fusion, and icp matching. Among them,
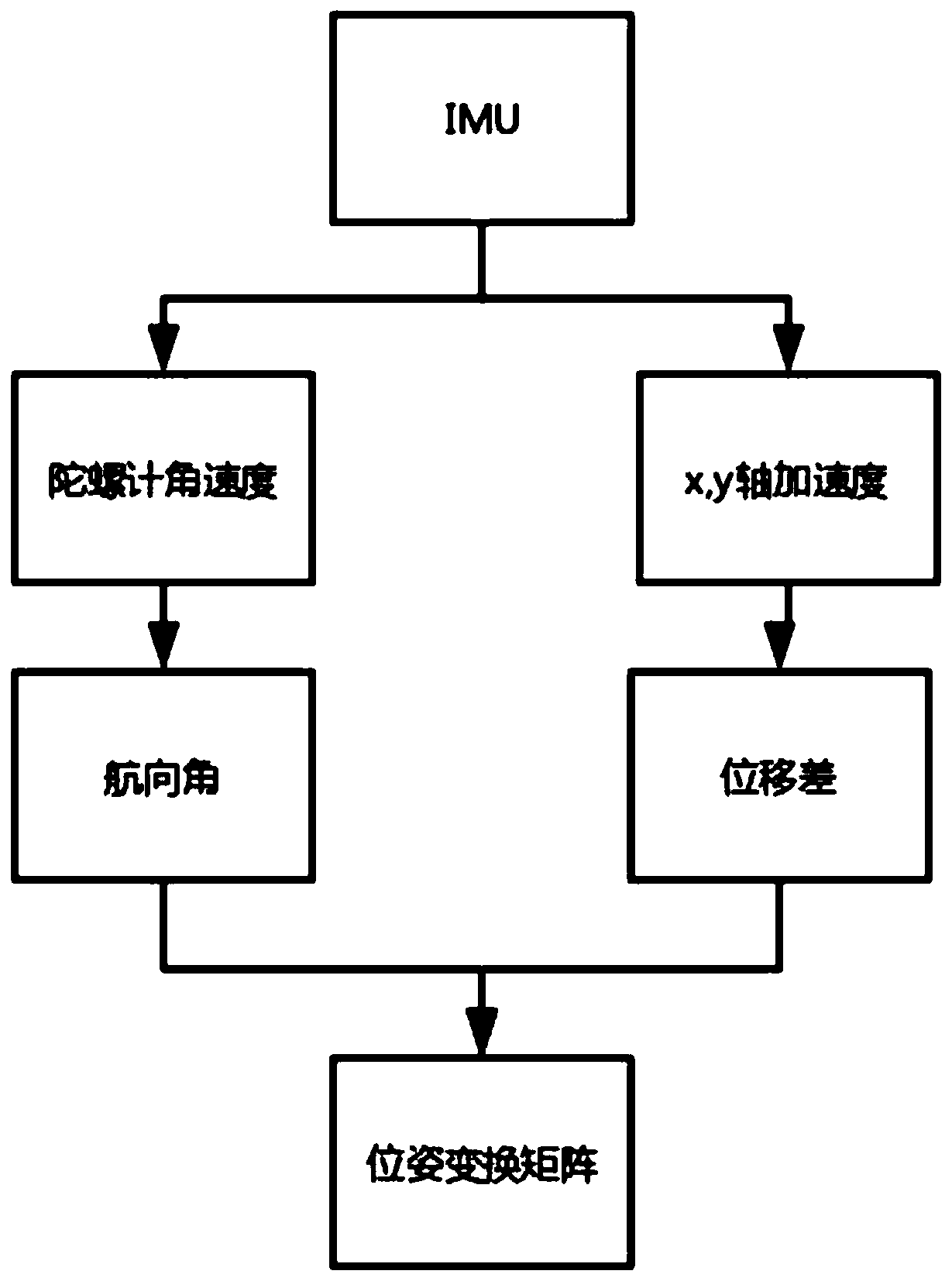
[0042] The position calculation is based on the three-axis attitude angle and acceleration read by imu, first through filtering, then removing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com