Method for implementing arbitrary linear controller by using active disturbance rejection control structure
A technology of active disturbance rejection control and linear controller, applied in the field of control theory and application, can solve the problem of lack of arbitrary linear controller, etc., and achieve the effect of simple and reliable control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0123] The given controller is:
[0124]
[0125] Through the steps described in S2 and S3, take b 0 = 1 to get the LADRC controller parameter as:
[0126] K 0 =[-0.0711 -0.4564 0.6226 0.0385],
[0127] L o =[1.7129 3.8064 2.9587 2.0458].
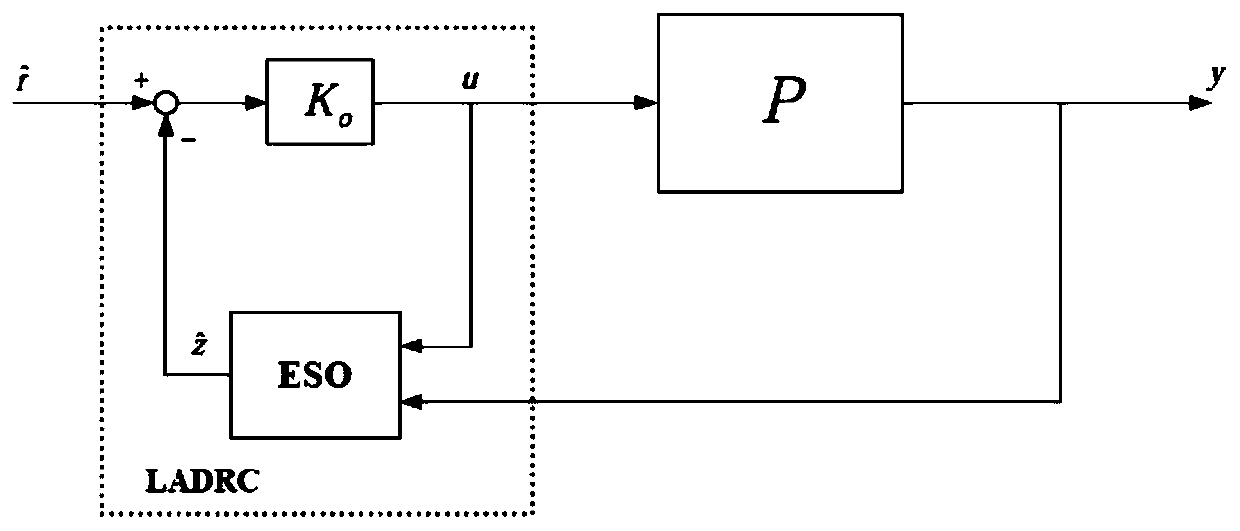
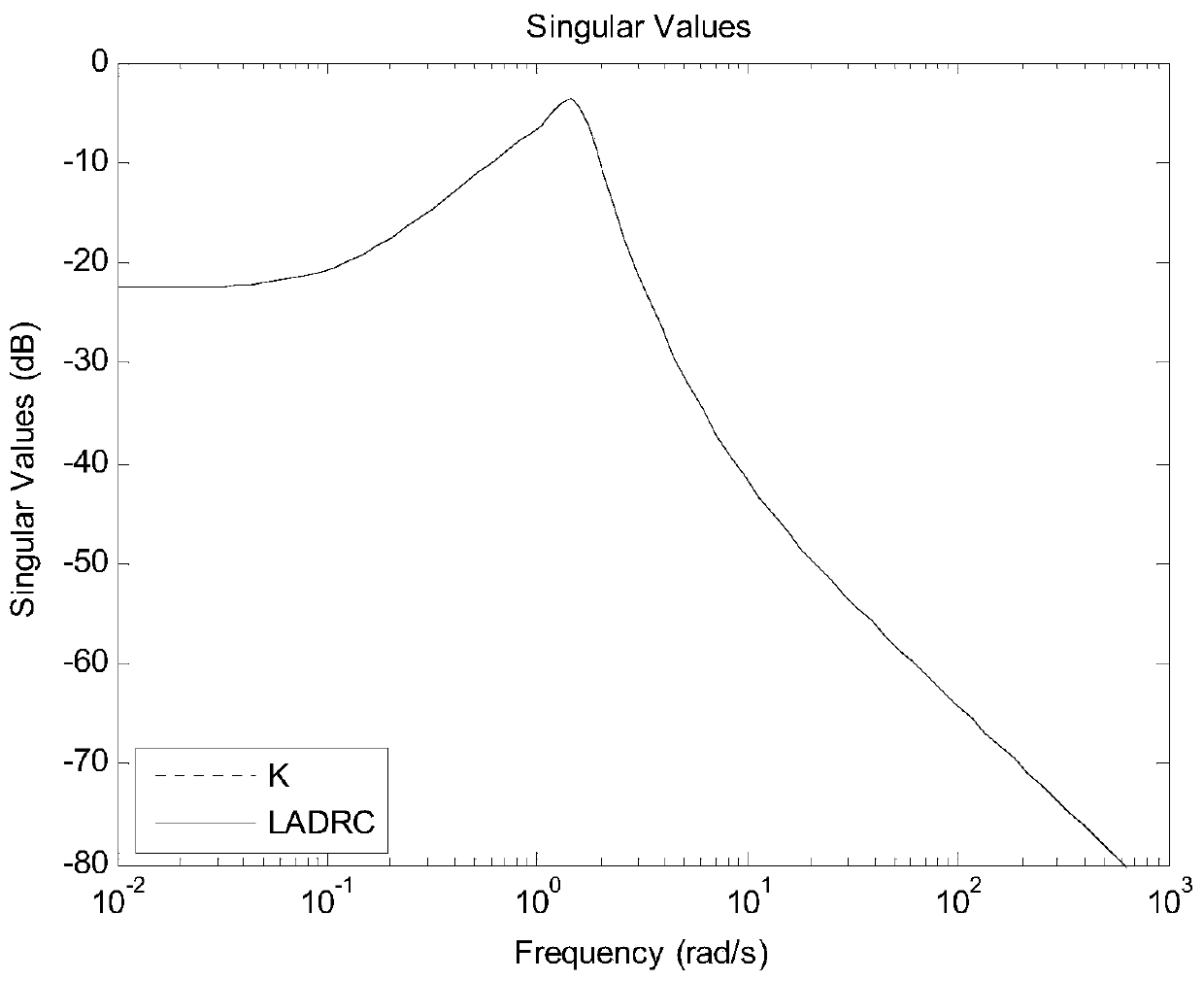
[0128] pass figure 2 , gives the frequency response curves of LADRC and a given controller K, and it can be seen that the two are completely coincident. so pass figure 1 The structure shown controls the actual controlled object, and can get the same anti-disturbance performance as K.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com