Magnetic sensor array based rotation-movement magnetic anomaly target detection device and method
A magnetic sensor and rotary motion technology, applied in the field of rotary motion magnetic anomaly target detection devices, can solve the problems of lack of characteristic information of magnetic anomaly signals and low positioning accuracy, so as to facilitate transportation and transfer, accurate positioning results, and meet real-time detection The effect of positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
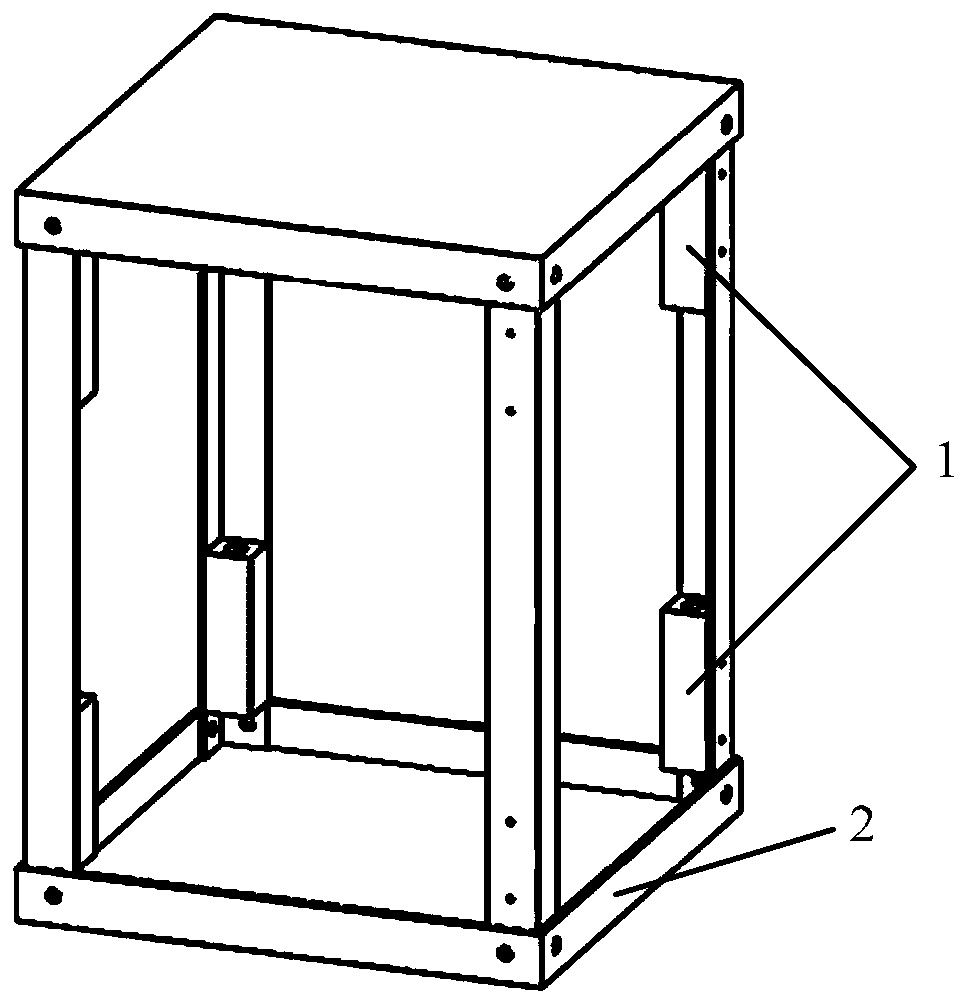
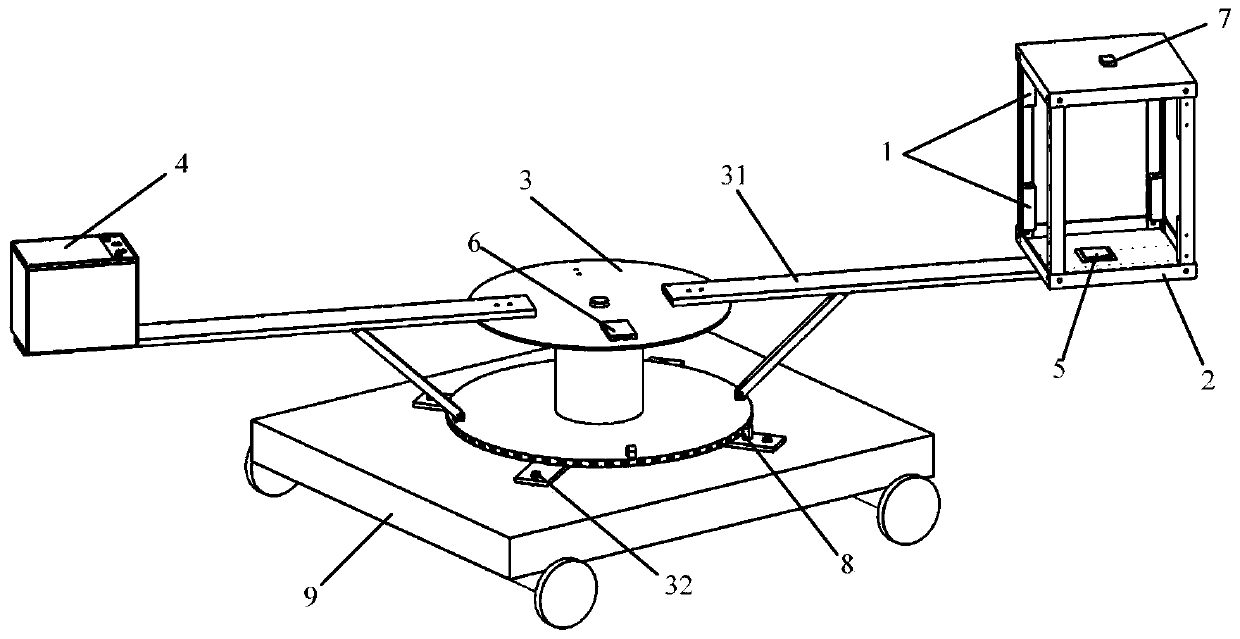
[0066] Such as figure 1 As shown, the magnetic sensor array is composed of 8 three-axis fluxgate sensors 1 and a magnetic sensor cube frame 2; the magnetic sensors 1 are located at the 8 vertices of the magnetic sensor cube frame 2, and the distance between adjacent magnetic sensors 1 is 0.3m; 8 magnetic sensors 1 are calibrated before installation, so their output performance can be regarded as basically consistent; the magnetic sensor cube frame 2 is made of non-magnetic materials such as aluminum alloy or carbon fiber.
[0067] Such as figure 2 As shown, the magnetic sensor cube frame 2 is fixed on the long rod 31 on the rotating mechanism, so that the magnetic sensor array can do circular motion with the rotation of the rotating mechanism 3; in order to ensure that the magnetic sensor array can move in the horizontal plane, the rotating mechanism The bottom of 3 is equipped with adjusting screw 32, makes the rotation axis of rotating mechanism 3 perpendicular to horizont...
Embodiment 2
[0088] In this embodiment, on the basis of Embodiment 1, multiple position detections are used to improve positioning accuracy. Such as Figure 6 As shown, the measurement baseline 1 and the measurement baseline 2 are perpendicular to each other, and the measurement points A and B are respectively located on the two measurement baselines. The rotating mechanism is equipped with a magnetic sensor array, and the magnetic anomaly target is detected at the measurement point A, and the magnetic anomaly signal of the three axes of the magnetic sensor is obtained according to Embodiment 1, and the target position vector is calculated by using the target positioning algorithm and the target magnetic moment Use the trolley 9 to transfer the target detection device to the measurement point B, and repeat the magnetic anomaly target detection work at the measurement point A. Combined with the characteristics of the magnetic anomaly signal curves in various directions, the parameters su...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com