Rout planning method for plant protection unmanned aerial vehicle
A technology for planting and protecting drones and routes, applied in three-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc. There are problems such as remaining, to achieve the effect of improving the comprehensive use performance, reducing the number of operations, and reducing the flight distance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with specific embodiment, further elaborate the present invention, see Figure 4 . The concrete steps of plant protection UAV route planning method of the present invention are:
[0032] Step 1. Locate the crop planting area through the map function in the plant protection UAV control software.
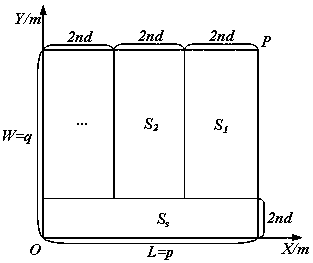
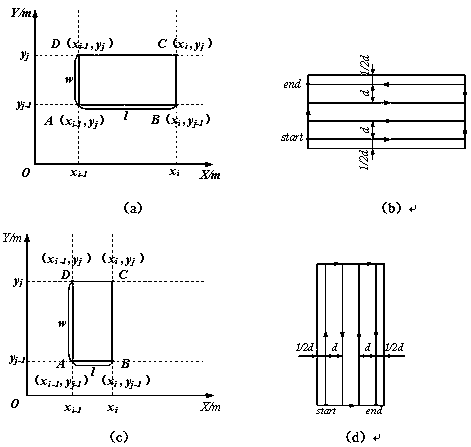
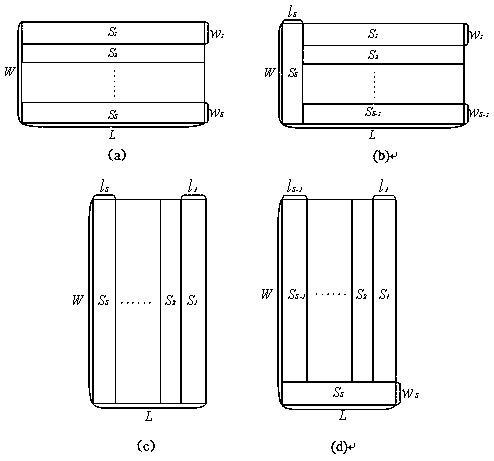
[0033] Step 2. Use the operation area selection function on the software to intercept the rectangular operation boundary of p×q in the map. The operation area meets the requirement that the length of the short side is 2nd (n is a positive integer, d is the spraying width of the plant protection drone), and the length of the long side is Not required. According to the different topography of the operation area, the horizontal operation area can be selected (such as image 3 -a, 3-b) or vertical operating area (such as image 3 -a, 3-b). The length and width of the entire working area can be displayed on the software interface.
[0034] Step 3. Input the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com