Underwater robot target tracking method based on deep learning and monocular vision
An underwater robot, deep learning technology, applied in instruments, image data processing, computing and other directions, can solve problems such as difficulties
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0123] (1) Deep learning architecture
[0124] Object recognition based on deep learning outperforms traditional machine learning with matching big data. Deep learning is a convolutional neural network (CNN) that has deep layers consisting of convolutional, round-robin, and fully-connected layers.
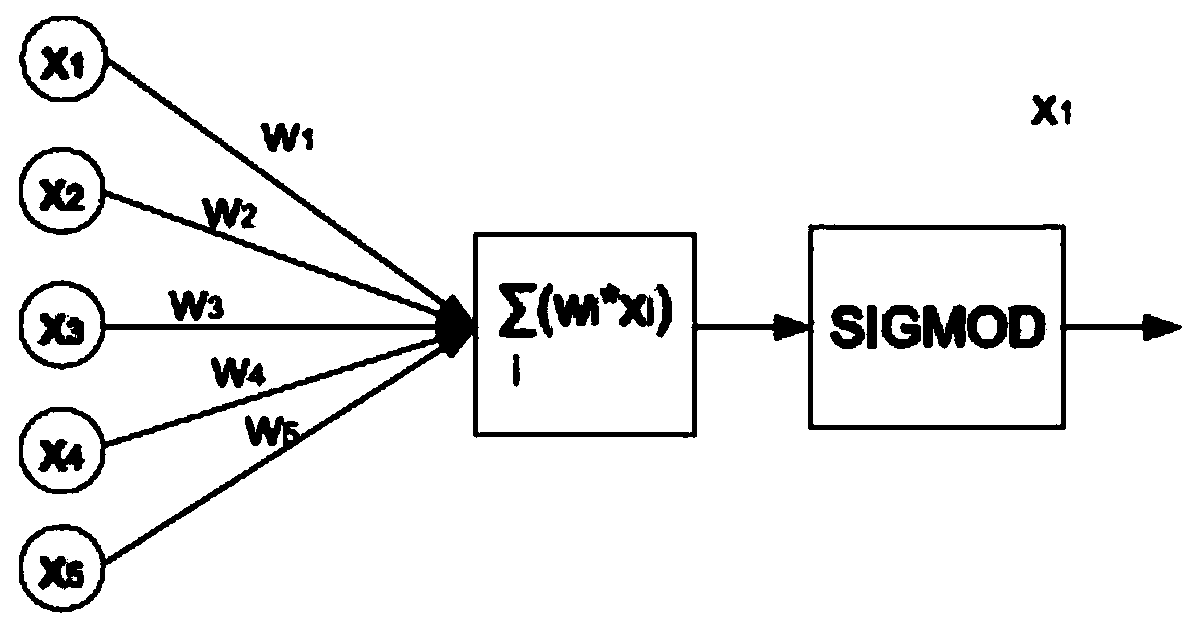
[0125] The most commonly used structure of neural network is figure 2 As shown, it consists of three layers, called input layer, hidden layer, and output layer, and each layer consists of one or more nodes represented by small circles. Narrow lines between nodes indicate the flow of information from one node to the next. The output layer has four nodes, four classes in the case of object classification. The nodes in the hidden and output layers are called active nodes, while the nodes in the input layer are called passive nodes. Every value from the input layer is copied and sent to all hidden nodes. Known as a fully interconnected structure. Such as image 3 As shown, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com