A self-stable multi-UAV landing device based on a parallel four-bar linkage mechanism for an unmanned boat platform
A parallel four-link, multi-UAV technology, which is applied in the directions of ships, aircraft, and landing gear used for aircraft, can solve the problem that UAVs cannot take off and land, and UAVs cannot carry multiple UAVs. Achieve the effect of easy take-off and landing and increased friction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
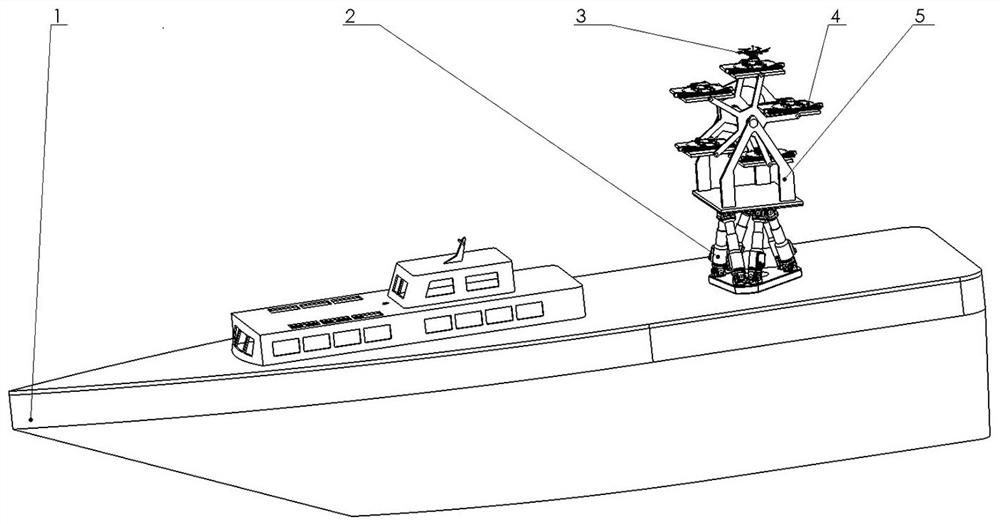
[0035] A self-stable multi-UAV landing device based on a parallel four-bar linkage mechanism for an unmanned boat platform, its structure is as follows Figure 1-Figure 9 As shown, including the unmanned boat 1, the unmanned boat 1 is provided with a six-degree-of-freedom parallel platform 2, and the six-degree-of-freedom parallel platform 2 is provided with a multi-layer rotating platform 5 matched with the six-degree-of-freedom parallel platform 2. Any platform on the rotating platform 5 is provided with a UAV fixing device 4, and the UAV fixing device 4 is provided with a UAV 3; the unmanned boat 1 is provided with a control system.
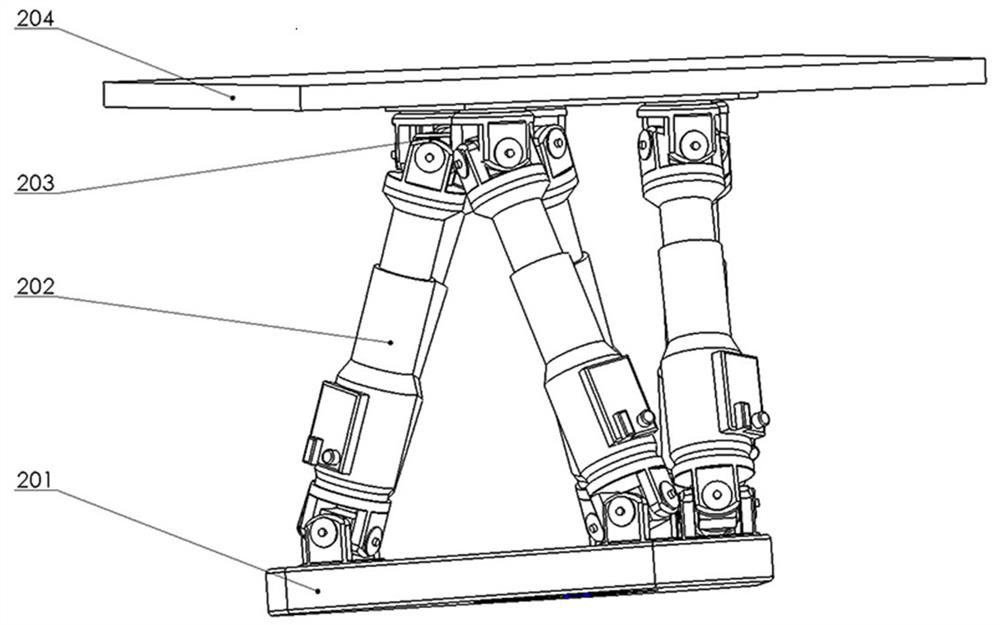
[0036]The six-degree-of-freedom parallel platform 2 includes a base 201, the base 201 is provided with a hydraulic cylinder 202, the hydraulic cylinder 202 is connected with an upper platform 204, and the upper platform 204 is provided with a level sensor; the hydraulic cylinder 202 is movably connected with the base 201 and the upper platform ...
Embodiment 2
[0041] A self-stable multi-unmanned aerial vehicle landing device based on a parallel four-bar linkage mechanism for an unmanned boat platform is different from Embodiment 1 in that: each claw platform 403 is provided with a claw.
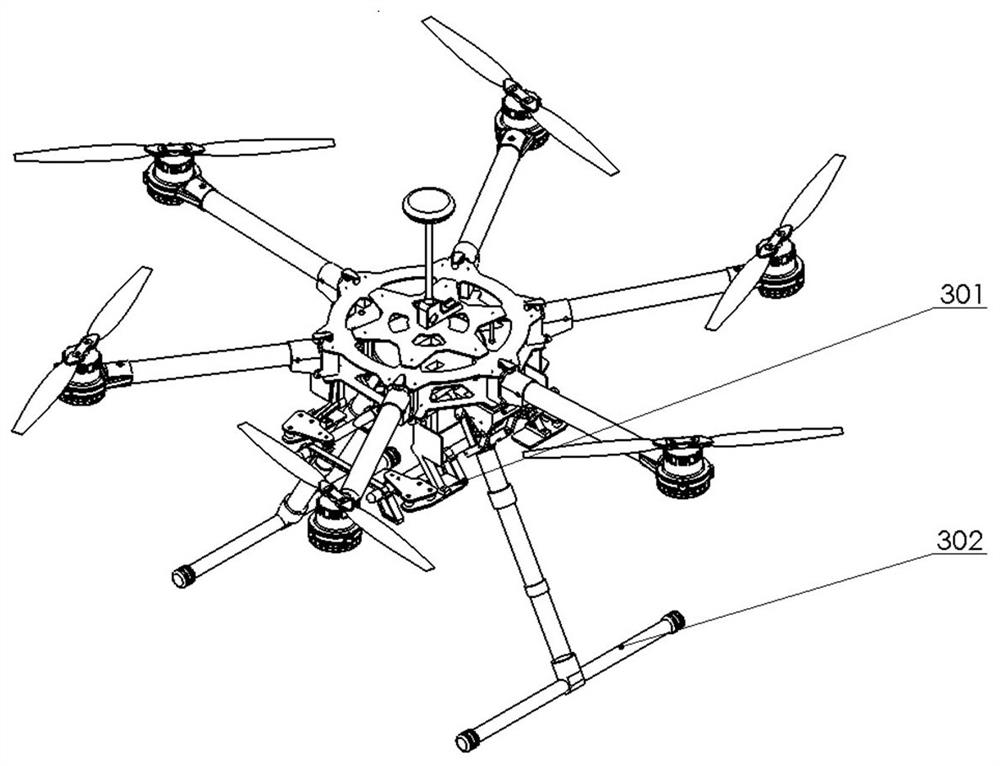
[0042] When the unmanned aerial vehicle 3 needs to land, the rotating motor on the rotating shaft 506 drives the rotating shaft 506 to rotate, so that the fixed plate 505 of the unmanned aerial vehicle 3 that does not stay on the multi-layer rotating platform 5 is rotated, so that the vacant fixed plate 505 is in a multi-layer At the top of the rotating platform 5, at this time, the vacancy fixing plate 505 is in an unobstructed state, so as to avoid collisions when the UAV 3 lands. The UAV 3 recognizes the long-distance positioning mark on the carrying platform 401 on the vacancy fixing plate 505 through the onboard camera 301, and the UAV 3 calculates the relative position between itself and the carrying platform 401 on the unmanned boat 1, contin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com