Intelligent vehicle lane-changing trajectory planning method based on nonlinear model predictive control
A nonlinear model and predictive control technology, applied in the field of intelligent vehicles, can solve problems such as less lateral control, and achieve the effect of concise thinking, clear design basis, and shortened development cycle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solution of the present invention and its simulation test will be introduced in detail below in conjunction with the accompanying drawings.
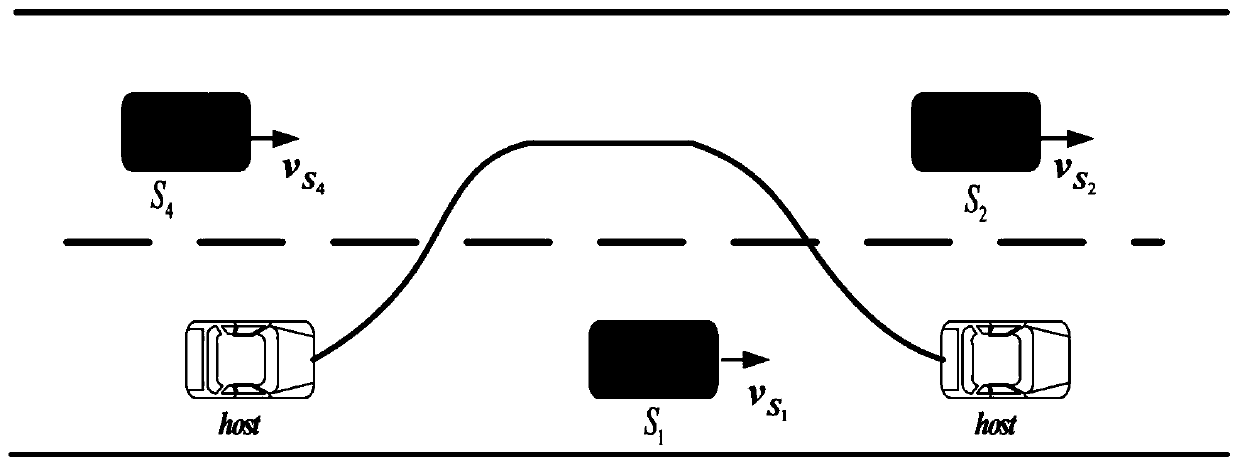
[0023] A method for real-time trajectory planning of intelligent vehicles based on nonlinear model predictive control, comprising the following steps:
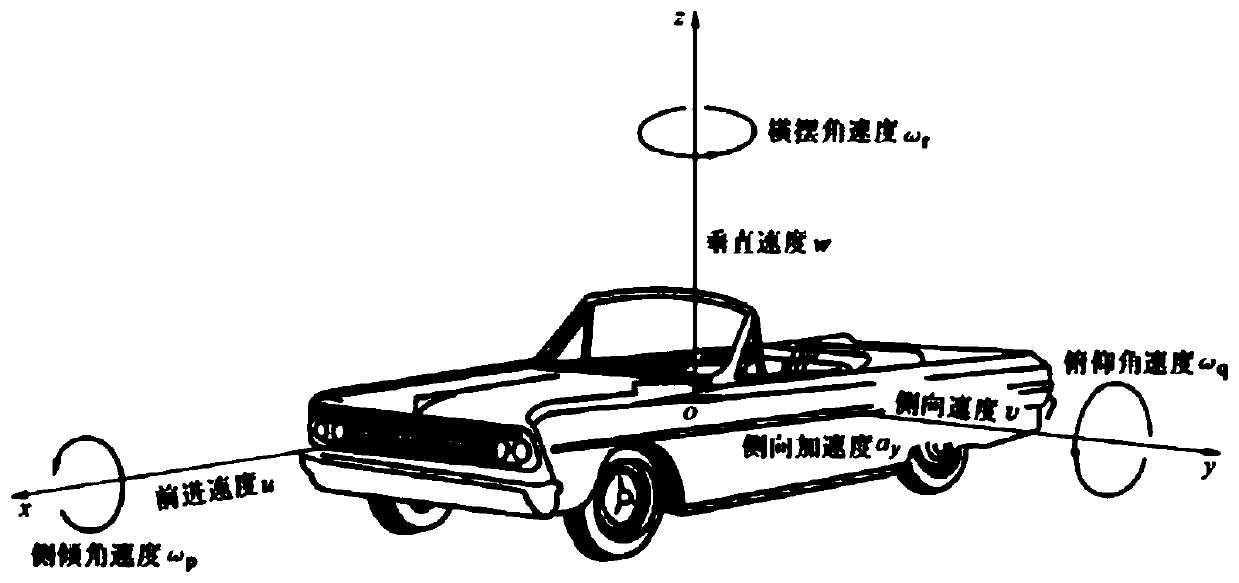
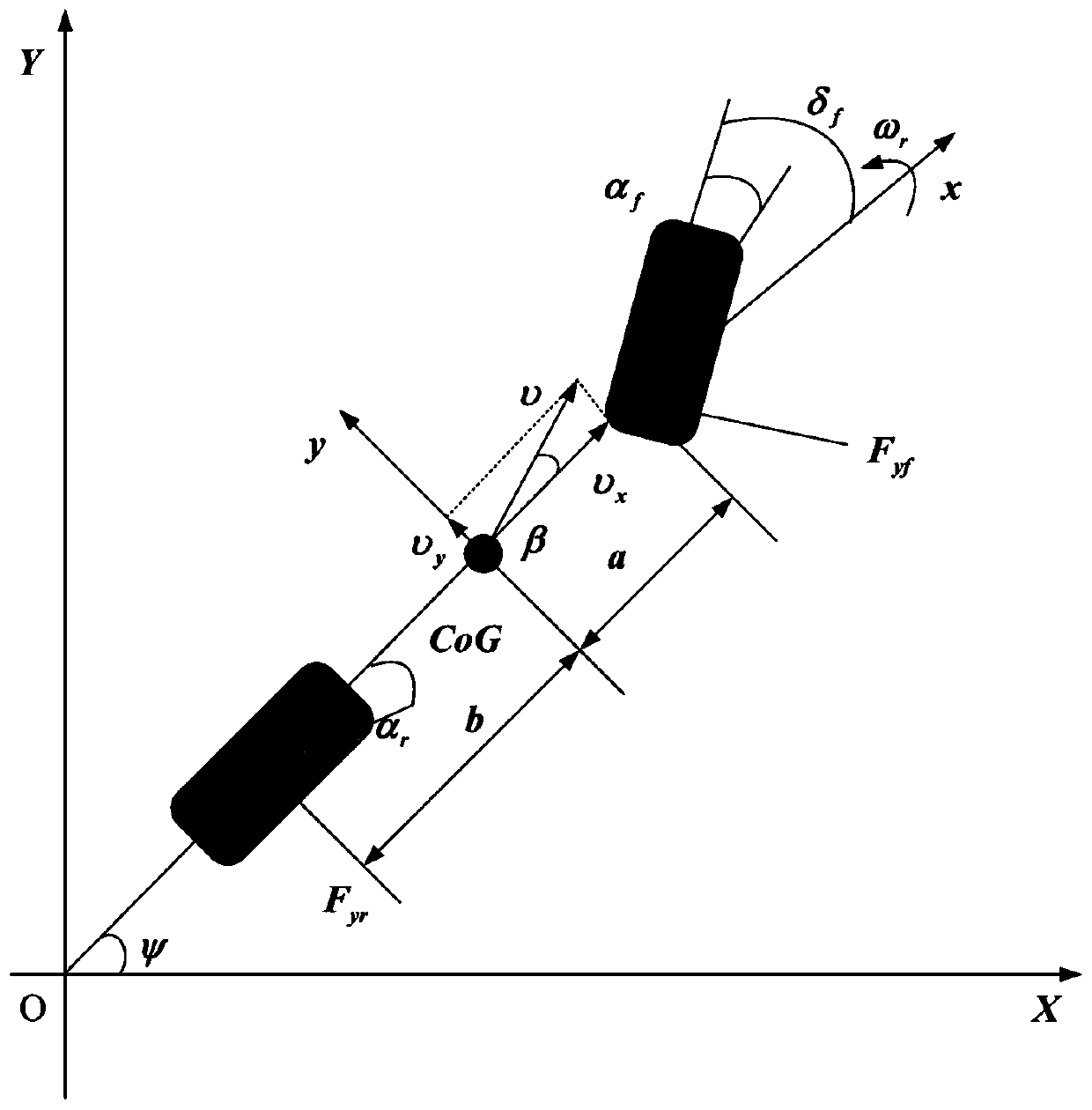
[0024] Step 1. The nonlinear dynamic model design of the intelligent vehicle: by combining the linear two-degree-of-freedom model of the vehicle and the kinematic equation of the vehicle under the earth coordinates, the nonlinear dynamic equation of the controlled object is established;
[0025] Step 2, nonlinear model predictive controller design:
[0026] 2.1) use the time interval T for the nonlinear dynamics model that described step 1 establishes s After discretization, the state prediction equation of the system in the prediction time domain is obtained;
[0027] 2.2) By introducing the cost function and constraints of the control problem, construct an NMPC p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com