Multi-pose lower-limb rehabilitation robot and use method thereof
A rehabilitation robot and lower limb technology, applied in passive exercise equipment, physical therapy and other directions, can solve the problems of single training posture and poor lower limb training effect, and achieve comprehensive training, high comfort and good training effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0067] Such as Figure 6 and Figure 7 As shown, a horizontal lower limb rehabilitation robot is mainly used for rehabilitation training of the lower limbs of patients with motor dysfunction in the lower limbs when they are in a lying position. The horizontal lower limb rehabilitation robot includes a base 1, a lifting mechanism 2, and a bed body 3 arranged sequentially from bottom to top, and a pair of thigh training mechanisms 4 are arranged symmetrically on both sides of the bed body 3. Among them, the base 1 is used as the installation body, the lifting mechanism 2 is used to lift the bed body 3, the bed body 3 is the position where the patient enters the rehabilitation robot, and the thigh training mechanism 4 is used to drive the patient's hip joint for rehabilitation training. The specific structure and working principle of the rehabilitation robot of this embodiment will be described in detail below.
[0068] Such as Figure 8 As shown, the base 1 is composed of a p...
Embodiment 2
[0076] Such as Figure 4 and Figure 5 As shown, a seated lower limb rehabilitation robot is mainly used for rehabilitation training of the patient's lower limb joints when the patient with motor dysfunction in the lower limb is in a sitting position. The seated lower limb rehabilitation robot includes a base 1, a lifting mechanism 2, and a bed body 3 arranged sequentially from bottom to top, and a pair of calf training mechanisms 5 are arranged symmetrically on both sides of one end of the bed body 3. Among them, the base 1 is used as the installation body, the lifting mechanism 2 is used to lift the bed body 3, the bed body 3 is the position where the patient enters the rehabilitation robot, and the calf training mechanism 5 is used to drive the ankle joint and knee joint of the patient's lower limbs for rehabilitation training. The specific structure and working principle of the rehabilitation robot of this embodiment will be described in detail below.
[0077] Such as ...
Embodiment 3
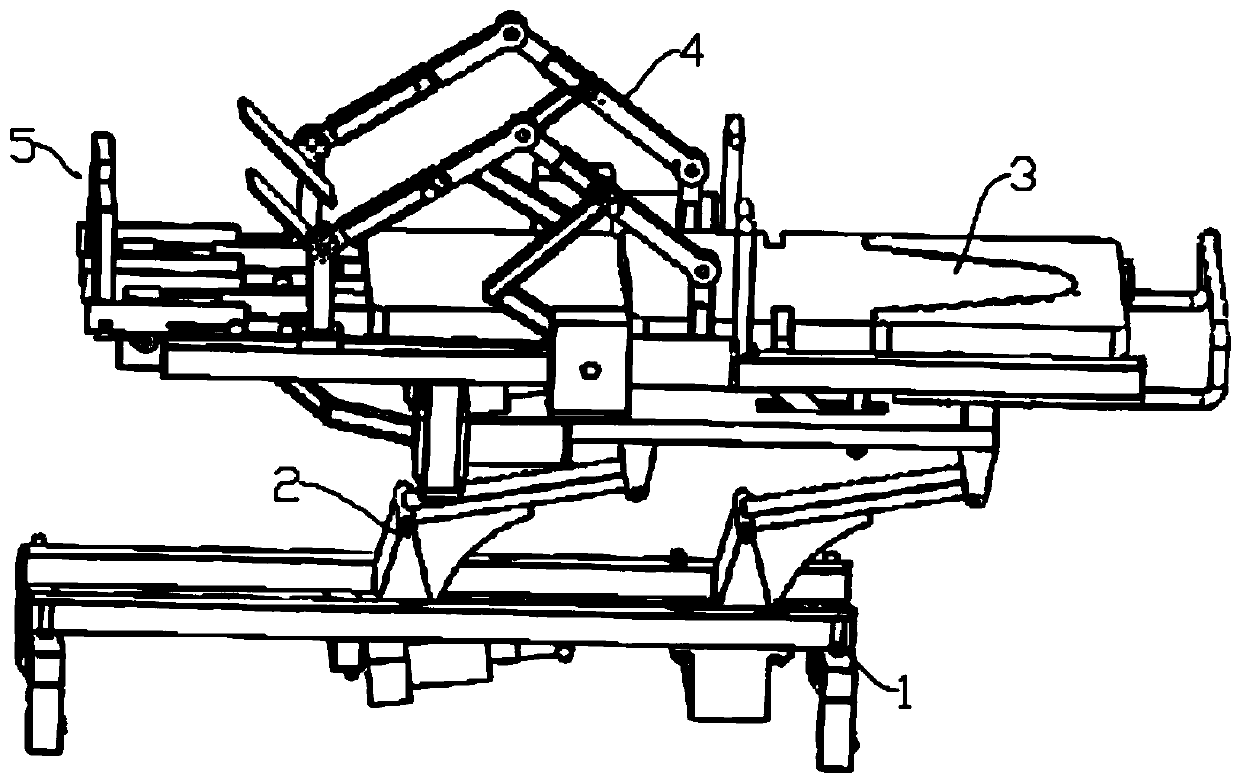
[0085] Such as Figure 1 to Figure 3 As shown, a multi-position lower limb rehabilitation robot is used for lower limb rehabilitation training for patients with lower limb motor dysfunction. The rehabilitation robot includes a base 1, a lifting mechanism 2, and a bed body 3 arranged sequentially from bottom to top, and a pair of thigh training mechanisms 4 and a pair of calf training mechanisms 5 are respectively symmetrically arranged on both sides. Among them, the base 1 is used as the installation body, the lifting mechanism 2 is used to lift the bed body 3, the bed body 3 is the position where the patient enters the rehabilitation robot, the thigh training mechanism 4 is used to drive the patient's hip joint for rehabilitation training, and the calf training mechanism 5 is used to Drive the ankle joint and knee joint of the patient's lower limbs for rehabilitation training. The specific structure and working principle of the rehabilitation robot of this embodiment will be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com